

Creator Rendimiento del sistema
Descubre qué nivel de precisión puedes esperar en este informe de rendimiento.
El sistema Pozyx Creator fue probado exhaustivamente en precisión, tasa de actualización y duración del alcance.
Precisión de posicionamiento
Para validar la precisión de posicionamiento del sistema Pozyx Creator, se realizaron pruebas exhaustivas utilizando datos de referencia con precisión milimétrica. Las pruebas se llevaron a cabo en un espacio de oficina de 7 m x 9 m, con una persona sosteniendo la etiqueta hacia arriba en la mano y moviéndose por el área. Para esta prueba se utilizaron cuatro anclajes, colocados en los bordes del área a una altura aproximada de 2 m. Las pruebas se realizaron usando el canal 5 de banda ultraancha, longitud de preámbulo 1024, prf 64 MHz y bitrate 110 kbps. Se pueden esperar resultados similares en distintos canales con diferentes bitrates o prf. Longitudes de preámbulo más cortas pueden reducir ligeramente la precisión.
Se realizó una prueba en un área abierta sin obstáculos, es decir, la prueba de línea de visión (LOS). Se realizó una segunda prueba con dos anclajes bloqueados de forma constante por estanterías metálicas llenas de botellas de agua; esta es la prueba sin línea de visión (NLOS). Se compararon dos algoritmos disponibles en la etiqueta Pozyx: el algoritmo UWB_ONLY y el algoritmo TRACKING, ambos para posicionamiento 3D. En la figura siguiente se muestra la función de distribución acumulada del error de posicionamiento horizontal (xy) en milímetros para ambos algoritmos.
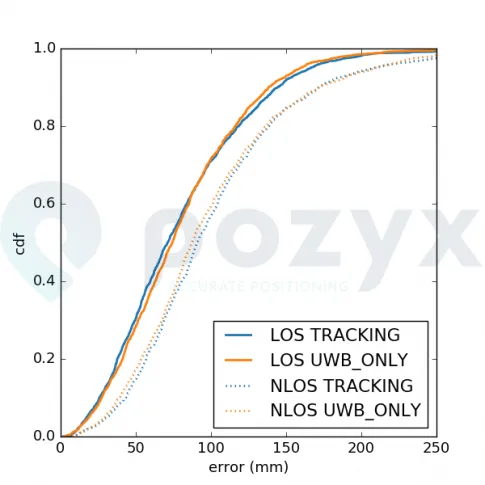
A partir de esta figura, se puede ver que ambos algoritmos ofrecen un rendimiento similar. Para ambos algoritmos, el error horizontal medio en LOS es de 92 mm y de 140 mm en NLOS. El error vertical medio fue normalmente mayor, lo cual es esperable como resultado de la mala colocación de los anclajes (todos en el mismo plano, a solo 2 m de altura). En las figuras siguientes se muestra un diagrama de dispersión de esta prueba para cada algoritmo.
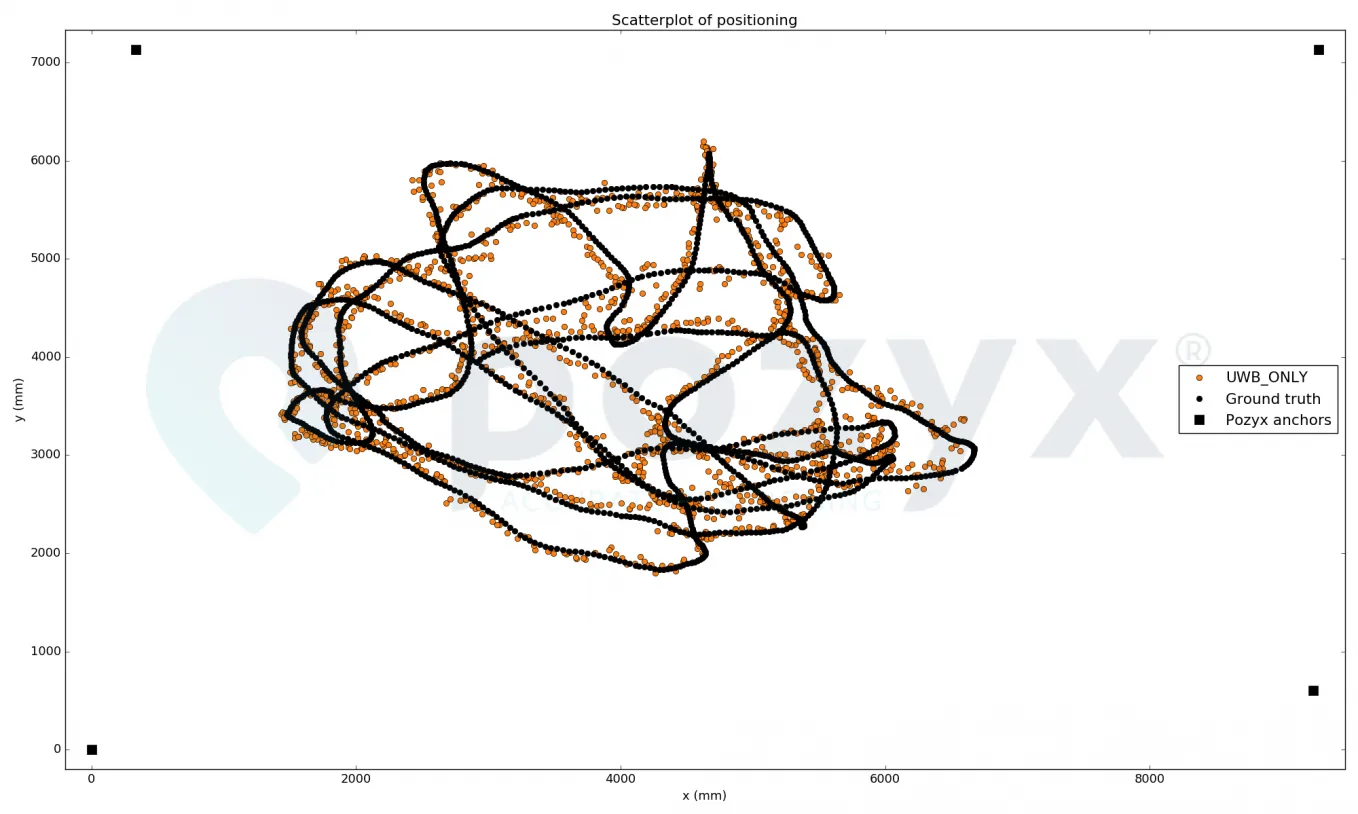
Aunque ambos algoritmos ofrecen un rendimiento similar en promedio, se puede ver que, en general, el algoritmo TRACKING proporciona una trayectoria mucho más suave, mientras que el algoritmo UWB_ONLY ofrece resultados más irregulares. Esto se debe a que el algoritmo TRACKING utiliza estimaciones de posición anteriores en su cálculo, lo que suaviza el resultado. Se recomienda usar el algoritmo TRACKING cuando se realiza un posicionamiento continuo. En escenarios en los que la posición solo se obtiene una vez, o a tasas de actualización muy bajas (varios segundos o minutos), se recomienda usar el algoritmo UWB_ONLY. Tenga en cuenta que la precisión puede ser menor fuera del área cubierta por los anclajes. Además, el mejor rendimiento se obtiene con las antenas en posición vertical. Para una mejor precisión en la dirección vertical, se recomienda colocar los anclajes a distintas alturas, suficientemente por encima y por debajo de la altura de la etiqueta. Esto reduce al máximo la dilución geométrica de la precisión (GDOP).
Duración del posicionamiento y tasa de actualización
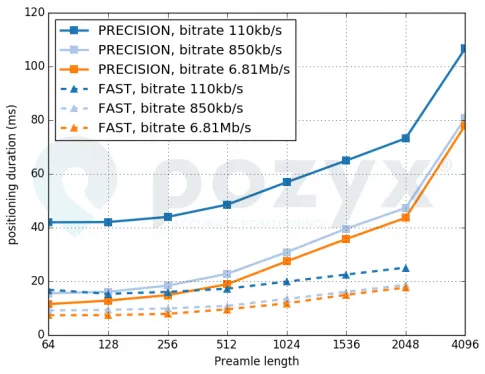
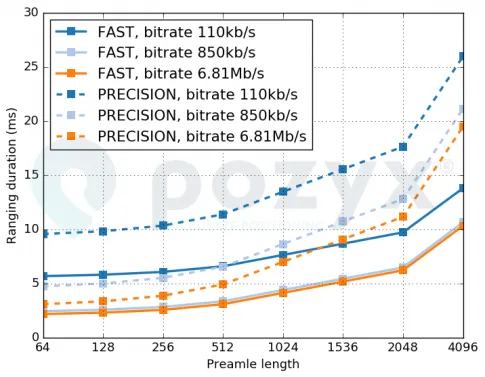
La tasa de actualización de posicionamiento que se puede lograr con el sistema Pozyx depende de varios ajustes, de los cuales la configuración de banda ultraancha tendrá el impacto más significativo. La tasa de actualización máxima posible para el posicionamiento es de alrededor de 140 Hz. En las figuras siguientes se muestra el tiempo de posicionamiento para varios ajustes. Las mediciones se realizaron cronometrando la duración en el Arduino. El sistema Pozyx se configuró para usar 4 anclajes y el algoritmo TRACKING. Además, el sistema Pozyx ofrece dos formas de recopilar las mediciones de alcance. Un método, llamado PRECISION, es el más lento y el más preciso. El algoritmo FAST, en general, es igual de preciso, pero requiere algo de tiempo para volverse exacto. Por lo general, durante los primeros 100 ms, la información de alcance no será precisa. Además, el protocolo FAST no puede proporcionar resultados precisos con longitudes de preámbulo más largas.
En la figura y en la tabla siguiente se muestra, respectivamente, la duración del posicionamiento y la tasa máxima de actualización.
Modo de alcance: PRECISION
Modo de alcance: FAST
Se observa que usar más anclajes aumentará la duración del posicionamiento, ya que deben realizarse más mediciones.
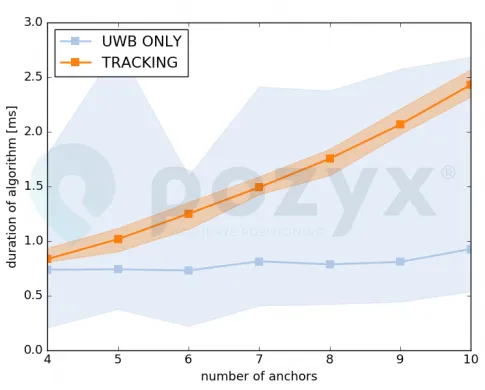
En la siguiente figura mostramos la duración de ambos algoritmos en función del número de anclajes utilizados para el posicionamiento. Estos resultados excluyen las mediciones de alcance. Por ello, los resultados ofrecen una muy buena indicación del retraso que se puede esperar, es decir, el tiempo entre medir la posición y obtener realmente la posición. Se verá que los retrasos son muy pequeños. Las líneas continuas muestran el tiempo medio, mientras que las áreas sombreadas indican la dispersión (tiempos mínimo y máximo medidos) de cada algoritmo. Se puede ver que el algoritmo UWB_ONLY normalmente requiere alrededor de 0,7 ms. Sin embargo, presenta una gran dispersión, inherente al algoritmo. Por lo general, en situaciones con mucho ruido y mala geometría de anclajes, la duración del algoritmo puede ser mayor que en casos con buenas mediciones. El algoritmo TRACKING requiere alrededor de 1 ms cuando se usan 4 anclajes, y hasta 2,5 ms para 10 anclajes. La dispersión es muy pequeña. Tenga en cuenta que la duración del procesamiento también puede depender de otros procesos que se ejecuten en segundo plano en el microcontrolador, como la comunicación a través de I2C o USB. Los resultados mostrados aquí se obtuvieron sin ningún otro proceso en ejecución en el dispositivo Pozyx.
Precisión del alcance
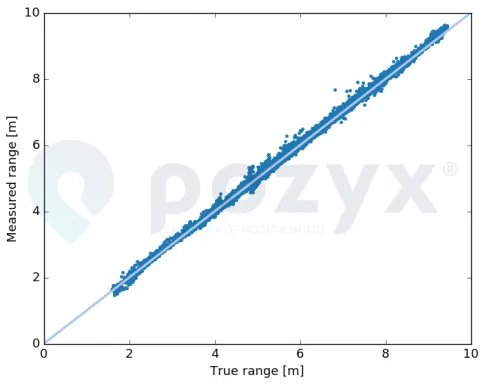
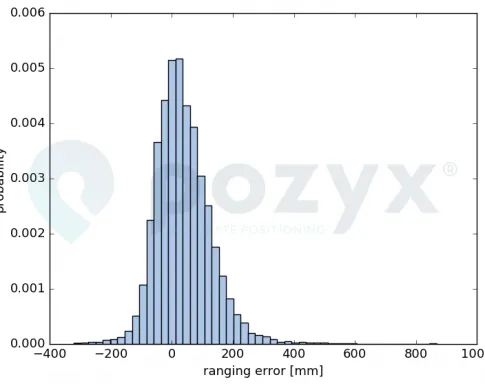
Se realizaron pruebas para comparar el alcance medido con el dispositivo Pozyx frente a una referencia con precisión milimétrica. Para las pruebas se utilizó el método de alcance PRECISION en el canal 5 de banda ultraancha, longitud de preámbulo 1024, prf 64 MHz y bitrate 110 kbps. Las pruebas se realizaron entre 2 m y 10 m. En total, se recopilaron 7000 mediciones de alcance. Los resultados se muestran en las figuras siguientes. El método de alcance FAST presenta errores similares tras un periodo de calentamiento de 100 ms con longitudes de preámbulo de hasta 1024.
Duración del alcance
Al igual que en el posicionamiento, la duración del proceso de alcance depende de varios ajustes. La configuración de banda ultraancha es la que más influye.
Consigue ahora tu kit de inicio
El kit de inicio es ideal para comenzar tu proyecto de hobby y probar el producto RTLS de Pozyx.
