

Creator Performances du système
Découvrez le niveau de précision attendu dans ce rapport de performance.
Le système Pozyx Creator a été testé de manière approfondie sur la précision, le taux de mise à jour et la durée de mesure de distance.
Précision de positionnement
Afin de valider la précision de positionnement du système Pozyx Creator, des tests approfondis ont été réalisés à l’aide de données de référence précises au millimètre. Les tests ont été effectués dans un espace de bureau de 7 m x 9 m, avec une personne tenant le tag vers le haut dans sa main et se déplaçant. Pour ce test, quatre ancres ont été utilisées, placées aux extrémités de la zone à une hauteur d’environ 2 m. Les tests ont été réalisés en utilisant le canal ultra-large bande 5, une longueur de préambule de 1024, un prf de 64 MHz et un débit de 110 kbps. Des résultats similaires peuvent être attendus sur différents canaux avec d’autres débits ou prf. Des longueurs de préambule plus courtes peuvent légèrement réduire la précision.
Un test a été réalisé dans une zone ouverte sans obstacles, c’est-à-dire le test en ligne de visée (LOS). Un second test a été réalisé avec deux ancres systématiquement bloquées par des racks métalliques remplis de bouteilles d’eau ; il s’agit du test hors ligne de visée (NLOS). Deux algorithmes disponibles sur le tag Pozyx ont été comparés : l’algorithme UWB_ONLY et l’algorithme TRACKING, tous deux pour un positionnement 3D. Dans la figure ci-dessous, la fonction de répartition cumulative de l’erreur de positionnement horizontale (xy) est présentée en millimètres pour les deux algorithmes.
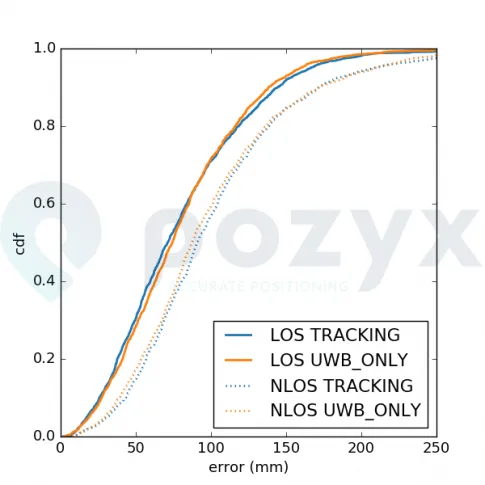
Cette figure montre que les deux algorithmes offrent des performances similaires. Pour les deux algorithmes, l’erreur horizontale moyenne en LOS est de 92 mm et de 140 mm en NLOS. L’erreur verticale moyenne était généralement plus élevée, ce qui est attendu en raison du mauvais placement des ancres (toutes dans le même plan, à seulement 2 m de hauteur). Dans les figures ci-dessous, un nuage de points de ce test est présenté pour chaque algorithme.
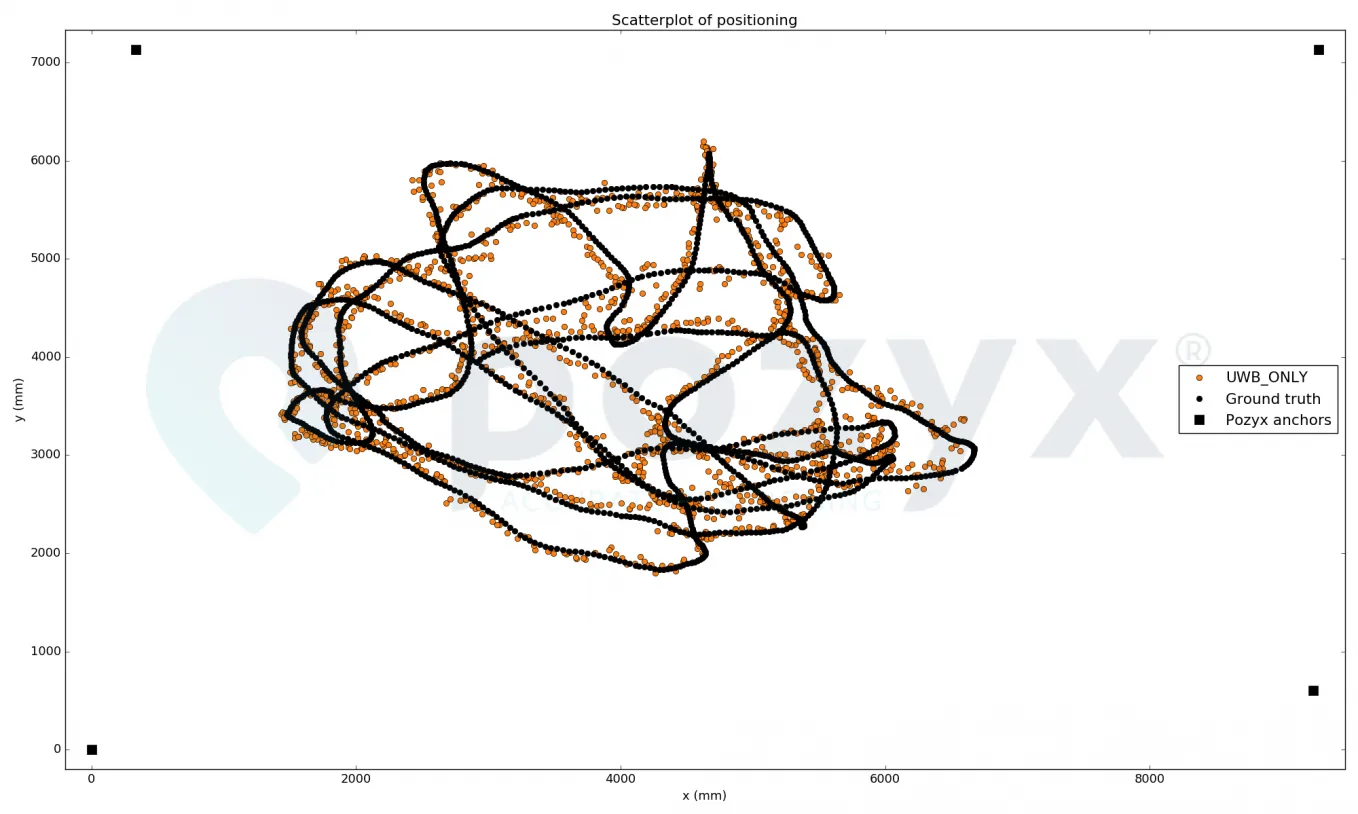
Bien que les deux algorithmes affichent en moyenne des performances similaires, on constate que, de manière générale, l’algorithme TRACKING fournit une trajectoire beaucoup plus fluide, tandis que l’algorithme UWB_ONLY produit des résultats plus instables. Cela s’explique par le fait que l’algorithme TRACKING utilise les estimations de position précédentes dans son calcul, ce qui lisse le résultat. Il est recommandé d’utiliser l’algorithme TRACKING pour le positionnement continu. Dans les scénarios où la position n’est obtenue qu’une seule fois, ou à très faible fréquence de mise à jour (plusieurs secondes ou minutes), il est recommandé d’utiliser l’algorithme UWB_ONLY. Notez que la précision peut être plus faible en dehors de la zone couverte par les ancres. Par ailleurs, les meilleures performances sont obtenues lorsque les antennes sont en position verticale. Pour une meilleure précision dans la direction verticale, il est recommandé de placer les ancres à différentes hauteurs, suffisamment au-dessus et au-dessous de la hauteur du tag. Cela réduit autant que possible la dilution géométrique de la précision (GDOP).
Durée de positionnement et taux de mise à jour
Le taux de mise à jour du positionnement que l’on peut obtenir avec le système Pozyx dépend d’un certain nombre de paramètres, dont les réglages ultra-large bande ont l’impact le plus important. Le taux de mise à jour maximal possible pour le positionnement est d’environ 140 Hz. Dans les figures ci-dessous, le timing du positionnement est présenté pour plusieurs réglages. Les mesures ont été effectuées en chronométrant la durée sur l’Arduino. Le système Pozyx a été configuré pour utiliser 4 ancres et l’algorithme TRACKING. Par ailleurs, le système Pozyx offre deux façons de collecter les mesures de distance. L’une, appelée PRECISION, est la plus lente et la plus précise. L’algorithme FAST est en général tout aussi précis, mais nécessite un certain temps pour devenir exact. En général, pendant les 100 premières ms, les informations de distance ne seront pas précises. De plus, le protocole FAST ne peut pas fournir de résultats précis pour les longueurs de préambule plus longues.
Dans la figure et le tableau ci-dessous, la durée de positionnement et le taux de mise à jour maximal sont présentés respectivement.
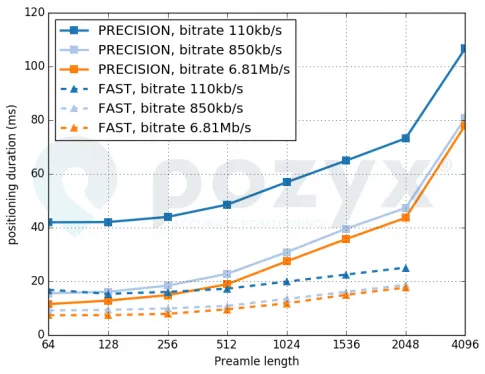
Mode de mesure de distance : PRECISION
Mode de mesure de distance : FAST
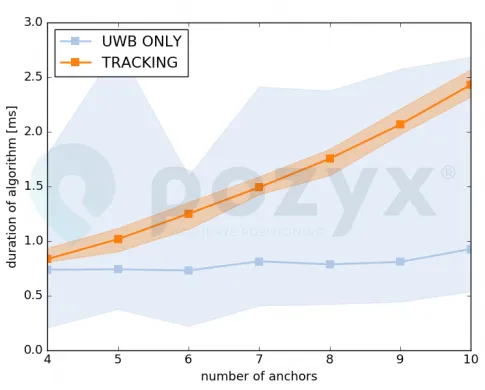
Il convient de noter que l’utilisation d’un plus grand nombre d’ancres augmente la durée de positionnement, car davantage de mesures doivent être effectuées.
Dans la figure suivante, nous montrons la durée des deux algorithmes en fonction du nombre d’ancres utilisées pour le positionnement. Ces résultats excluent les mesures de distance. De ce fait, ils donnent une très bonne indication du délai auquel on peut s’attendre, c’est-à-dire le temps entre la mesure de la position et l’obtention effective de la position. On constate que les délais sont très faibles. Les lignes pleines montrent le temps moyen, tandis que les zones ombrées indiquent l’écart (temps minimum et maximum mesurés) pour chaque algorithme. On constate que l’algorithme UWB_ONLY nécessite généralement environ 0,7 ms. Cependant, il présente une grande dispersion, inhérente à l’algorithme. En général, dans des situations comportant beaucoup de bruit et une mauvaise géométrie des ancres, la durée de l’algorithme peut être plus élevée que dans des cas avec de bonnes mesures. L’algorithme TRACKING nécessite environ 1 ms avec 4 ancres, et jusqu’à 2,5 ms avec 10 ancres. La dispersion est très faible. Notez que la durée de traitement peut également dépendre d’autres processus exécutés en arrière-plan sur le microcontrôleur, tels que la communication via I2C ou USB. Les résultats présentés ici sont obtenus sans aucun autre processus en cours d’exécution sur le dispositif Pozyx.
Précision de mesure de distance
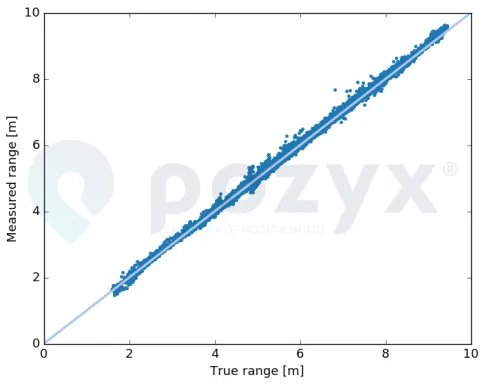
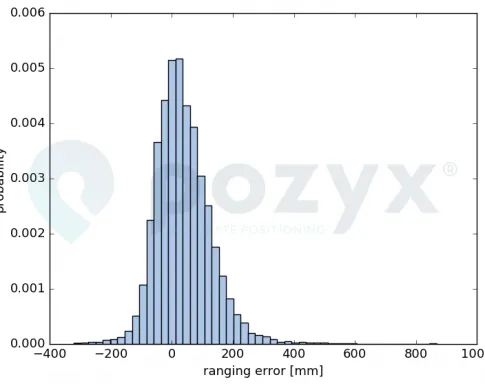
Des tests ont été réalisés pour comparer la distance mesurée avec le dispositif Pozyx à une référence précise au millimètre. Pour ces tests, la méthode de mesure de distance PRECISION a été utilisée sur le canal ultra-large bande 5, avec une longueur de préambule de 1024, un prf de 64 MHz et un débit de 110 kbps. Les tests ont été effectués entre 2 m et 10 m. Au total, 7000 mesures de distance ont été collectées. Les résultats sont présentés dans les figures ci-dessous. La méthode de mesure de distance FAST présente des erreurs similaires après une période de chauffe de 100 ms avec des longueurs de préambule allant jusqu’à 1024.
Durée de mesure de distance
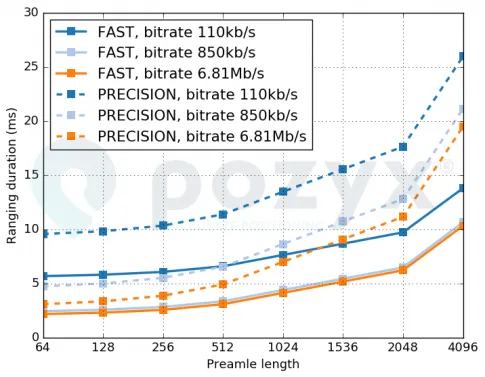
Comme pour le positionnement, la durée du processus de mesure de distance dépend d’un certain nombre de paramètres. Les réglages ultra-large bande ont l’impact le plus important.
Obtenez votre kit de démarrage dès maintenant
Le kit de démarrage est idéal pour lancer votre projet personnel et tester le produit Pozyx RTLS.
