

Creator systeemprestaties
Ontdek welke nauwkeurigheid u kunt verwachten in dit prestatierapport.
Het Pozyx Creator System is uitgebreid getest op nauwkeurigheid, updatesnelheid en meetduur.
Positioneringsnauwkeurigheid
Om de positioneringsnauwkeurigheid van het Pozyx Creator System te valideren, zijn uitgebreide tests uitgevoerd met mm-nauwkeurige ground truth-gegevens. De tests werden uitgevoerd in een kantoorruimte van 7 m x 9 m, waarbij een persoon de tag omhoog in zijn hand hield en rondliep. Voor deze test werden vier anchors gebruikt, geplaatst aan de randen van het gebied op ongeveer 2 m hoogte. De tests werden uitgevoerd met ultra-wideband kanaal 5, preamblelengte 1024, prf 64 MHz en bitrate 110 kbps. Vergelijkbare resultaten kunnen worden verwacht op andere kanalen met andere bitrates of prf. Kortere preamblelengtes kunnen de nauwkeurigheid licht verlagen.
Eén test werd uitgevoerd in een open gebied zonder obstakels, oftewel de line-of-sight (LOS)-test. Een tweede test werd uitgevoerd met twee anchors die voortdurend werden geblokkeerd door metalen rekken gevuld met waterflessen; dit is de non-line-of-sight (NLOS)-test. Twee algoritmen die beschikbaar zijn op de Pozyx-tag werden vergeleken: het UWB_ONLY-algoritme en het TRACKING-algoritme, beide voor 3D-positionering. In de onderstaande figuur wordt de cumulatieve distributiefunctie van de horizontale (xy) positioneringsfout in millimeter weergegeven voor beide algoritmen.
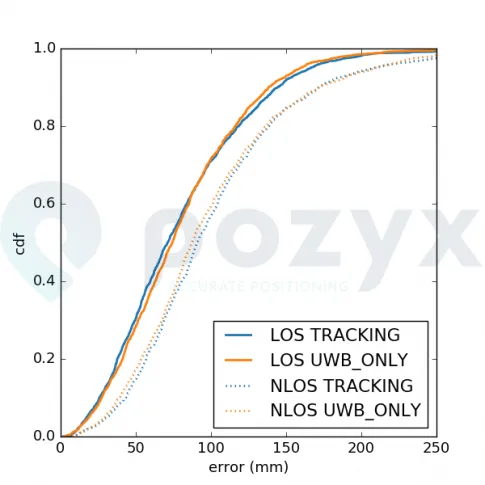
Uit deze figuur blijkt dat beide algoritmen vergelijkbaar presteren. Voor beide algoritmen bedraagt de gemiddelde horizontale fout in LOS 92 mm en in NLOS 140 mm. De gemiddelde verticale fout was doorgaans groter, wat te verwachten is als gevolg van de ongunstige plaatsing van de anchors (allemaal in hetzelfde vlak op slechts 2 m hoogte). In de onderstaande figuren wordt voor elk algoritme een spreidingsdiagram van deze test getoond.
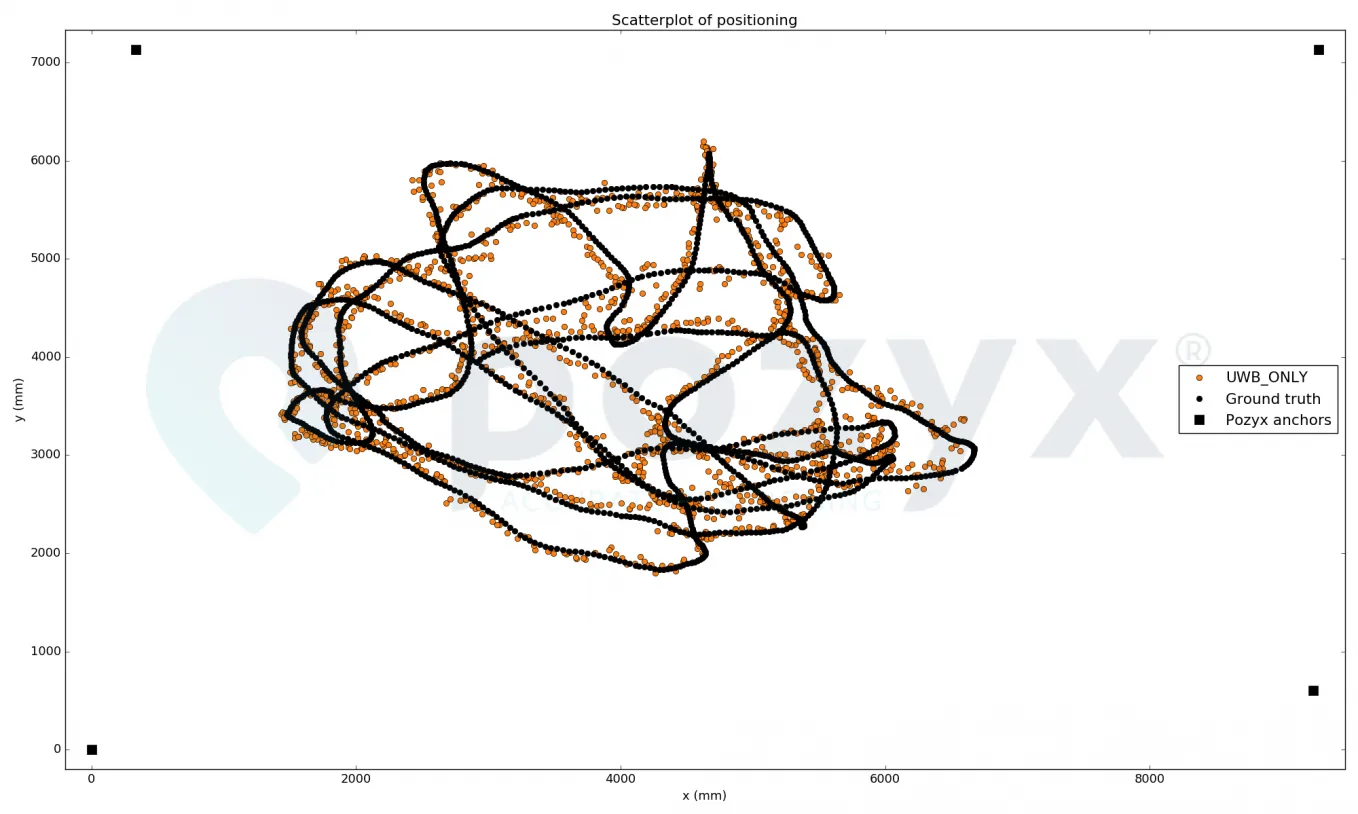
Hoewel beide algoritmen gemiddeld vergelijkbaar presteren, is te zien dat het TRACKING-algoritme in het algemeen een veel vloeiender traject oplevert, terwijl het UWB_ONLY-algoritme meer schokkerige resultaten geeft. Dit komt doordat het TRACKING-algoritme eerdere positieramingen gebruikt in zijn schatting, waardoor het resultaat wordt afgevlakt. Het wordt aangeraden het TRACKING-algoritme te gebruiken bij continue positionering. In scenario's waarin de positie slechts één keer wordt bepaald, of bij zeer lage updatesnelheden (enkele seconden of minuten), wordt aangeraden het UWB_ONLY-algoritme te gebruiken. Let op: de nauwkeurigheid kan lager zijn buiten het gebied dat door de anchors wordt gedekt. Bovendien wordt de beste prestatie bereikt wanneer de antennes rechtop staan. Voor een betere nauwkeurigheid in verticale richting wordt aangeraden de anchors op verschillende hoogtes te plaatsen, voldoende hoger en lager dan de hoogte van de tag. Dit vermindert de geometric dilution of precision (GDOP) zoveel mogelijk.
Positioneringsduur en updatesnelheid
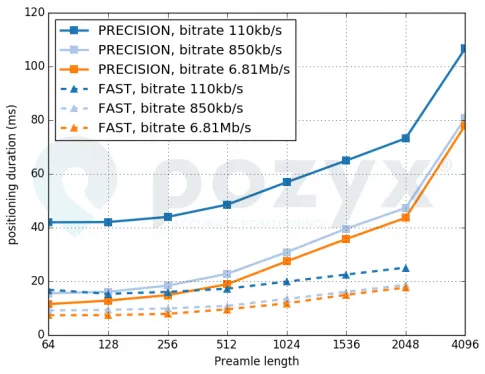
De positioneringsupdatesnelheid die met het Pozyx-systeem kan worden bereikt, hangt af van een aantal instellingen, waarvan de ultra-wideband-instellingen de grootste impact hebben. De hoogst mogelijke updatesnelheid voor positionering ligt rond 140 Hz. In de onderstaande figuren wordt de timing van de positionering voor verschillende instellingen getoond. De metingen werden uitgevoerd door de duur op de Arduino te timen. Het Pozyx-systeem was geconfigureerd om 4 anchors en het TRACKING-algoritme te gebruiken. Daarnaast biedt het Pozyx-systeem twee manieren om de range-metingen te verzamelen. Eén methode, PRECISION genaamd, is de langzaamste en meest nauwkeurige. Het FAST-algoritme is in het algemeen even nauwkeurig, maar heeft enige tijd nodig om nauwkeurig te worden. In het algemeen zijn de range-gegevens gedurende de eerste 100 ms niet nauwkeurig. Ook kan het FAST-protocol geen nauwkeurige resultaten leveren voor langere preamblelengtes.
In de figuur en de onderstaande tabel worden respectievelijk de positioneringsduur en de maximale updatesnelheid getoond.
Meetmodus: PRECISION
Meetmodus: FAST
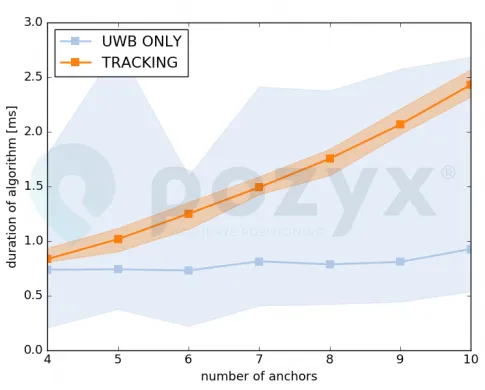
Er wordt opgemerkt dat het gebruik van meer anchors de positioneringsduur verlengt, omdat er meer metingen moeten worden uitgevoerd.
In de volgende figuur tonen we de duur van beide algoritmen als functie van het aantal anchors dat voor positionering wordt gebruikt. Deze resultaten sluiten de range-metingen uit. Daardoor geven de resultaten een zeer goede indicatie van de verwachte vertraging, d.w.z. de tijd tussen het meten van de positie en het daadwerkelijk verkrijgen van de positie. Er zal blijken dat de vertragingen zeer klein zijn. De doorgetrokken lijnen tonen de gemiddelde tijd, terwijl de gearceerde gebieden de spreiding aangeven (gemeten minimum- en maximumtijden) voor elk algoritme. Te zien is dat het UWB_ONLY-algoritme doorgaans ongeveer 0,7 ms nodig heeft. Het vertoont echter een grote spreiding, wat inherent is aan het algoritme. Doorgaans kan in situaties met veel ruis en een slechte anchor-geometrie de duur van het algoritme hoger zijn dan in gevallen met goede metingen. Het TRACKING-algoritme heeft ongeveer 1 ms nodig bij gebruik van 4 anchors en tot 2,5 ms bij 10 anchors. De spreiding is zeer klein. Let op: de verwerkingsduur kan ook afhangen van andere processen die op de microcontroller op de achtergrond draaien, zoals communicatie via I2C of USB. De hier getoonde resultaten zijn zonder dat er andere processen op het Pozyx-apparaat draaien.
Meetnauwkeurigheid
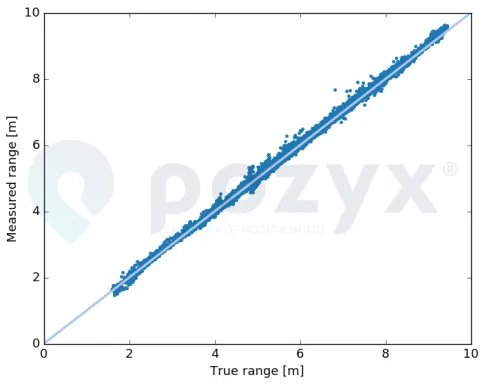
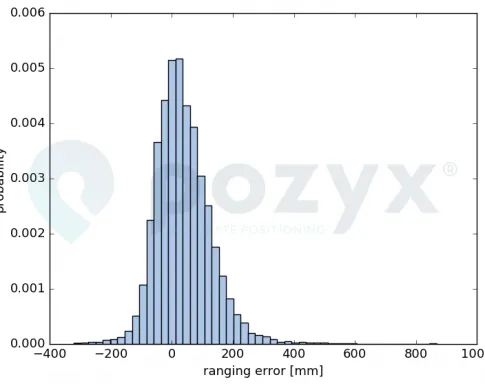
Er werden tests uitgevoerd om de gemeten afstand met het Pozyx-apparaat te vergelijken met een ground truth met millimeternauwkeurigheid. Voor de tests werd de PRECISION-meetmethode gebruikt op ultra-wideband kanaal 5, preamblelengte 1024, prf 64 MHz en bitrate 110 kbps. De tests werden uitgevoerd tussen 2 m en 10 m. In totaal werden 7000 afstandsmetingen verzameld. De resultaten worden getoond in de onderstaande figuren. De FAST-meetmethode vertoont vergelijkbare fouten na een opwarmperiode van 100 ms met preamblelengtes tot 1024.
Meetduur
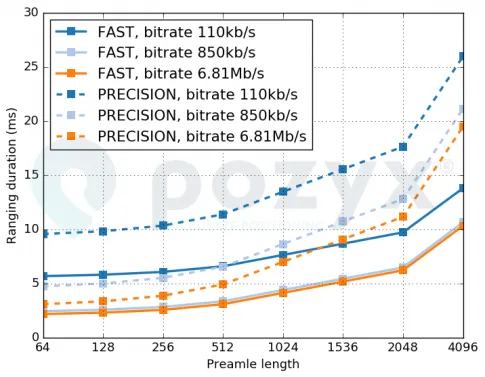
Net als bij positionering hangt de duur van het meetproces af van een aantal instellingen. De ultra-wideband-instellingen hebben de grootste invloed.
Vraag nu uw starterkit aan
De starterkit is ideaal om aan de slag te gaan met uw hobbyproject en het Pozyx RTLS-product uit te proberen.
