

Creator Systemleistung
Erfahren Sie in diesem Leistungsbericht, welche Genauigkeit Sie erwarten können.
Das Pozyx Creator System wurde umfassend auf Genauigkeit, Aktualisierungsrate und Messdauer getestet.
Positionierungsgenauigkeit
Um die Positionierungsgenauigkeit des Pozyx Creator Systems zu validieren, wurden umfangreiche Tests mit mm-genauen Ground-Truth-Daten durchgeführt. Die Tests fanden in einem Büroraum von 7 m x 9 m statt, wobei eine Person den Tag in der Hand nach oben hielt und sich bewegte. Für diesen Test wurden vier Anker verwendet, die an den Rändern des Bereichs in etwa 2 m Höhe platziert waren. Getestet wurde mit Ultra-Wideband-Kanal 5, Präambellänge 1024, PRF 64 MHz und Bitrate 110 kbps. Ähnliche Ergebnisse sind auch bei anderen Kanälen mit anderen Bitraten oder PRF zu erwarten. Kürzere Präambellängen können die Genauigkeit leicht verringern.
Ein Test wurde in einem offenen Bereich ohne Hindernisse durchgeführt, also der Line-of-Sight-(LOS)-Test. Ein zweiter Test wurde mit zwei Ankern durchgeführt, die dauerhaft durch mit Wasserflaschen gefüllte Metallregale blockiert waren; dies ist der Non-Line-of-Sight-(NLOS)-Test. Verglichen wurden zwei auf dem Pozyx-Tag verfügbare Algorithmen: der UWB_ONLY-Algorithmus und der TRACKING-Algorithmus, beide für 3D-Positionierung. In der folgenden Abbildung ist die kumulative Verteilungsfunktion des horizontalen (xy-)Positionierungsfehlers in Millimetern für beide Algorithmen dargestellt.
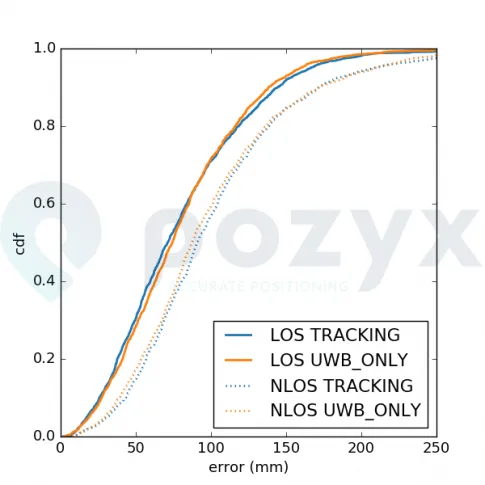
Aus dieser Abbildung ist ersichtlich, dass beide Algorithmen ähnlich gut abschneiden. Bei beiden Algorithmen beträgt der durchschnittliche horizontale Fehler im LOS 92 mm und im NLOS 140 mm. Der durchschnittliche vertikale Fehler war typischerweise größer, was aufgrund der ungünstigen Ankerplatzierung zu erwarten ist (alle in derselben Ebene auf nur 2 m Höhe). In den folgenden Abbildungen ist für jeden Algorithmus ein Streudiagramm dieses Tests dargestellt.
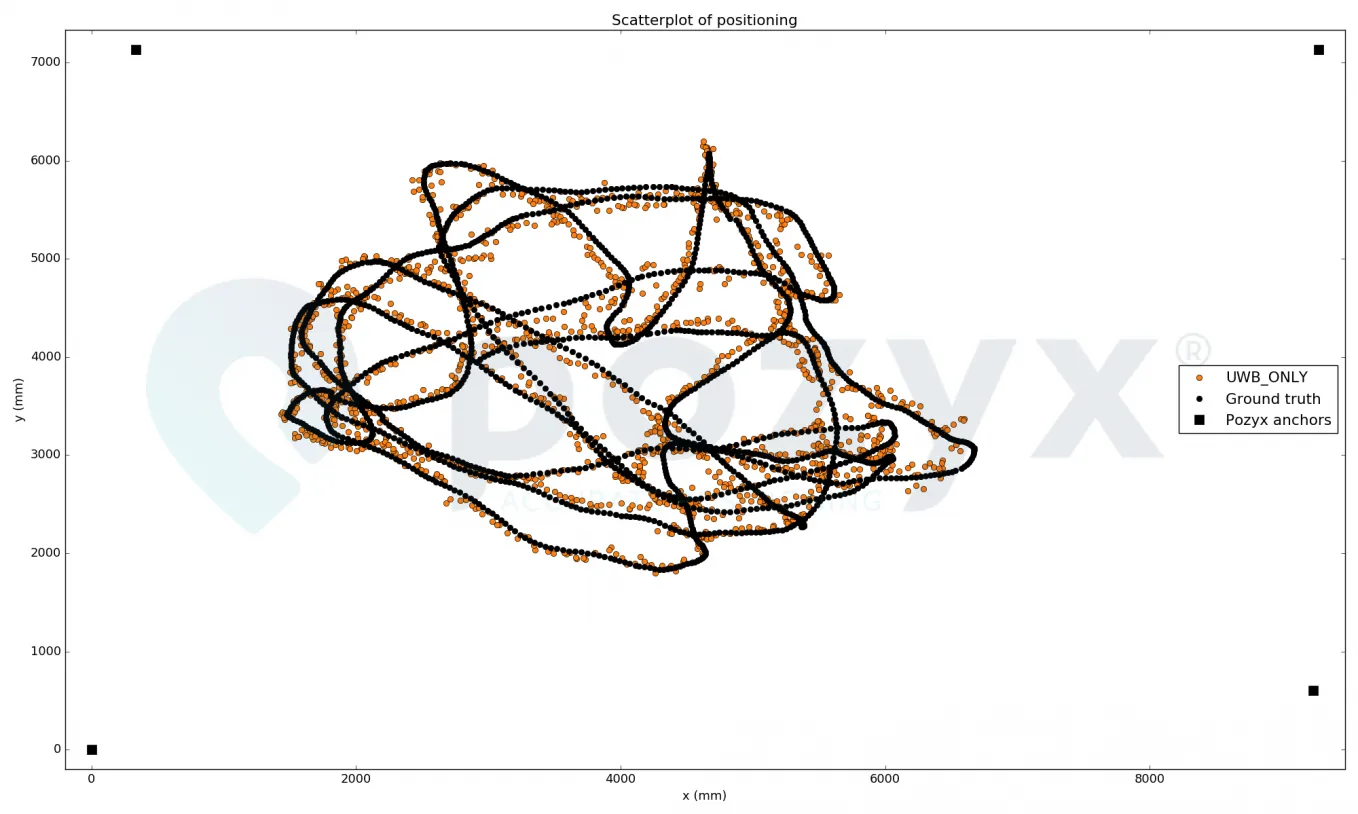
Obwohl beide Algorithmen im Durchschnitt ähnlich gut abschneiden, ist zu sehen, dass der TRACKING-Algorithmus im Allgemeinen eine deutlich gleichmäßigere Bahn liefert, während der UWB_ONLY-Algorithmus sprunghaftere Ergebnisse liefert. Das liegt daran, dass der TRACKING-Algorithmus frühere Positionsschätzungen in seine Berechnung einbezieht und so das Ergebnis glättet. Für kontinuierliche Positionierung wird empfohlen, den TRACKING-Algorithmus zu verwenden. In Szenarien, in denen die Position nur einmal ermittelt wird oder die Aktualisierungsrate sehr niedrig ist (mehrere Sekunden oder Minuten), wird empfohlen, den UWB_ONLY-Algorithmus zu verwenden. Beachten Sie, dass die Genauigkeit außerhalb des von den Ankern abgedeckten Bereichs geringer sein kann. Außerdem wird die beste Leistung erzielt, wenn die Antennen aufrecht stehen. Für eine bessere Genauigkeit in vertikaler Richtung wird empfohlen, die Anker auf unterschiedlichen Höhen zu platzieren, deutlich höher und niedriger als die Höhe des Tags. Dadurch wird die geometrische Dilution of Precision (GDOP) so weit wie möglich reduziert.
Positionierungsdauer und Aktualisierungsrate
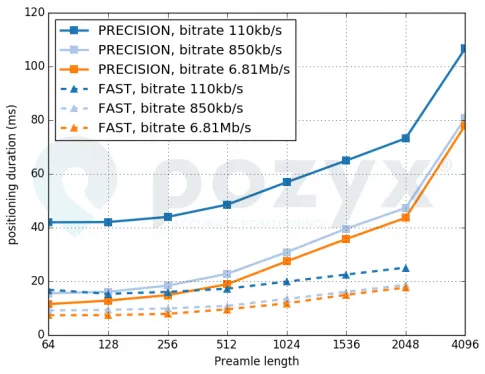
Die mit dem Pozyx-System erreichbare Positionierungs-Aktualisierungsrate hängt von einer Reihe von Einstellungen ab, wobei die Ultra-Wideband-Einstellungen den größten Einfluss haben. Die höchstmögliche Aktualisierungsrate für die Positionierung liegt bei etwa 140 Hz. In den folgenden Abbildungen wird das Timing der Positionierung für mehrere Einstellungen gezeigt. Die Messungen wurden durch Zeitmessung der Dauer auf dem Arduino durchgeführt. Das Pozyx-System wurde so konfiguriert, dass 4 Anker und der TRACKING-Algorithmus verwendet werden. Außerdem bietet das Pozyx-System zwei Möglichkeiten zur Erfassung der Distanzmessungen. Eine Methode namens PRECISION ist die langsamste und genaueste. Der FAST-Algorithmus ist im Allgemeinen ebenso genau, benötigt jedoch etwas Zeit, um präzise zu werden. Im Allgemeinen sind die Distanzdaten in den ersten 100 ms nicht präzise. Außerdem kann das FAST-Protokoll bei längeren Präambellängen keine genauen Ergebnisse liefern.
In der Abbildung und in der folgenden Tabelle werden die Dauer der Positionierung bzw. die maximale Aktualisierungsrate gezeigt.
Messmodus: PRECISION
Messmodus: FAST
Es ist zu beachten, dass die Verwendung von mehr Ankern die Positionierungsdauer erhöht, da mehr Messungen durchgeführt werden müssen.
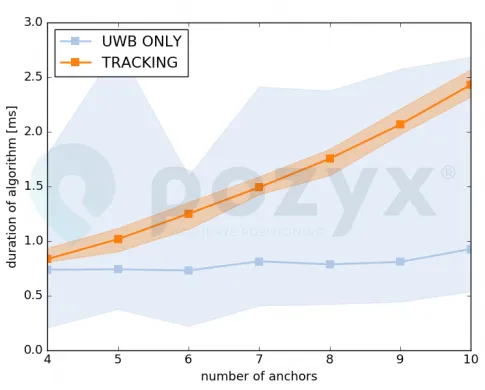
In der nächsten Abbildung zeigen wir die Dauer beider Algorithmen in Abhängigkeit von der Anzahl der für die Positionierung verwendeten Anker. Diese Ergebnisse schließen die Distanzmessungen aus. Dadurch geben die Ergebnisse einen sehr guten Hinweis auf die zu erwartende Verzögerung, also die Zeit zwischen der Messung der Position und dem tatsächlichen Erhalt der Position. Es wird zu sehen sein, dass die Verzögerungen sehr gering sind. Die durchgezogenen Linien zeigen die durchschnittliche Zeit, während die schattierten Bereiche die Streuung (gemessene Minimal- und Maximalzeiten) für jeden Algorithmus angeben. Es ist zu sehen, dass der UWB_ONLY-Algorithmus typischerweise etwa 0,7 ms benötigt. Allerdings weist er eine große Streuung auf, die dem Algorithmus inhärent ist. Typischerweise kann die Dauer des Algorithmus in Situationen mit viel Rauschen und ungünstiger Ankergeometrie höher sein als bei guten Messungen. Der TRACKING-Algorithmus benötigt bei Verwendung von 4 Ankern etwa 1 ms und bei 10 Ankern bis zu 2,5 ms. Die Streuung ist sehr gering. Beachten Sie, dass die Verarbeitungsdauer auch von anderen Prozessen abhängen kann, die im Hintergrund auf dem Mikrocontroller laufen, wie etwa Kommunikation über I2C oder USB. Die hier gezeigten Ergebnisse wurden ohne andere auf dem Pozyx-Gerät laufende Prozesse ermittelt.
Messgenauigkeit
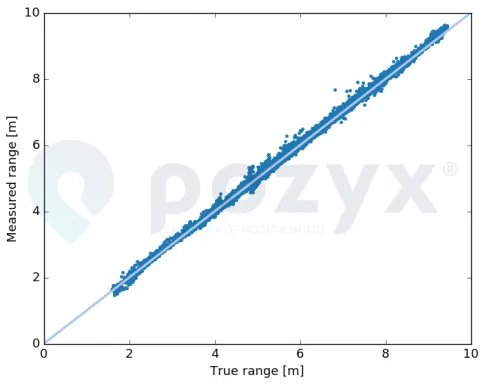
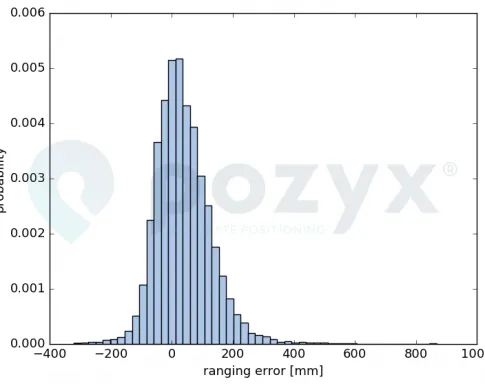
Es wurden Tests durchgeführt, um die mit dem Pozyx-Gerät gemessene Distanz mit einer millimetergenauen Ground Truth zu vergleichen. Für die Tests wurde die PRECISION-Messmethode auf Ultra-Wideband-Kanal 5, Präambellänge 1024, PRF 64 MHz und Bitrate 110 kbps verwendet. Die Tests wurden zwischen 2 m und 10 m durchgeführt. Insgesamt wurden 7000 Distanzmessungen erfasst. Die Ergebnisse sind in den folgenden Abbildungen dargestellt. Die FAST-Messmethode zeigt nach einer Aufwärmphase von 100 ms bei Präambellängen bis 1024 ähnliche Fehler.
Messdauer
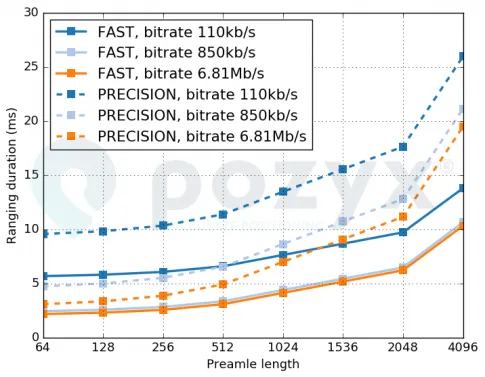
Ähnlich wie bei der Positionierung hängt die Dauer des Messvorgangs von einer Reihe von Einstellungen ab. Die Ultra-Wideband-Einstellungen haben den größten Einfluss.
Holen Sie sich jetzt Ihr Starter-Kit
Das Starter-Kit ist ideal, um mit Ihrem Hobbyprojekt zu starten und das Pozyx RTLS-Produkt zu testen.
