Pozyx RTLS-release v2025.2

We zijn verheugd de release van Pozyx RTLS v2025.2 aan te kondigen, een grote update die inzet op schaalbaarheid, openheid en flexibelere implementaties. Deze release introduceert nieuwe mogelijkheden waarmee RTLS eenvoudiger kan worden uitgerold en opgeschaald in complexe omgevingen, terwijl de betrouwbare prestaties voor indoor location tracking behouden blijven.
Benaderde UWB-positionering en betere fallbackmechanismen
Het belangrijkste onderdeel van RTLS v2025.2 is de introductie van benaderde UWB-positionering, een sleutelfunctie die flexibelere en kosteneffectieve RTLS-implementaties mogelijk maakt zonder in te boeten op zichtbaarheid.
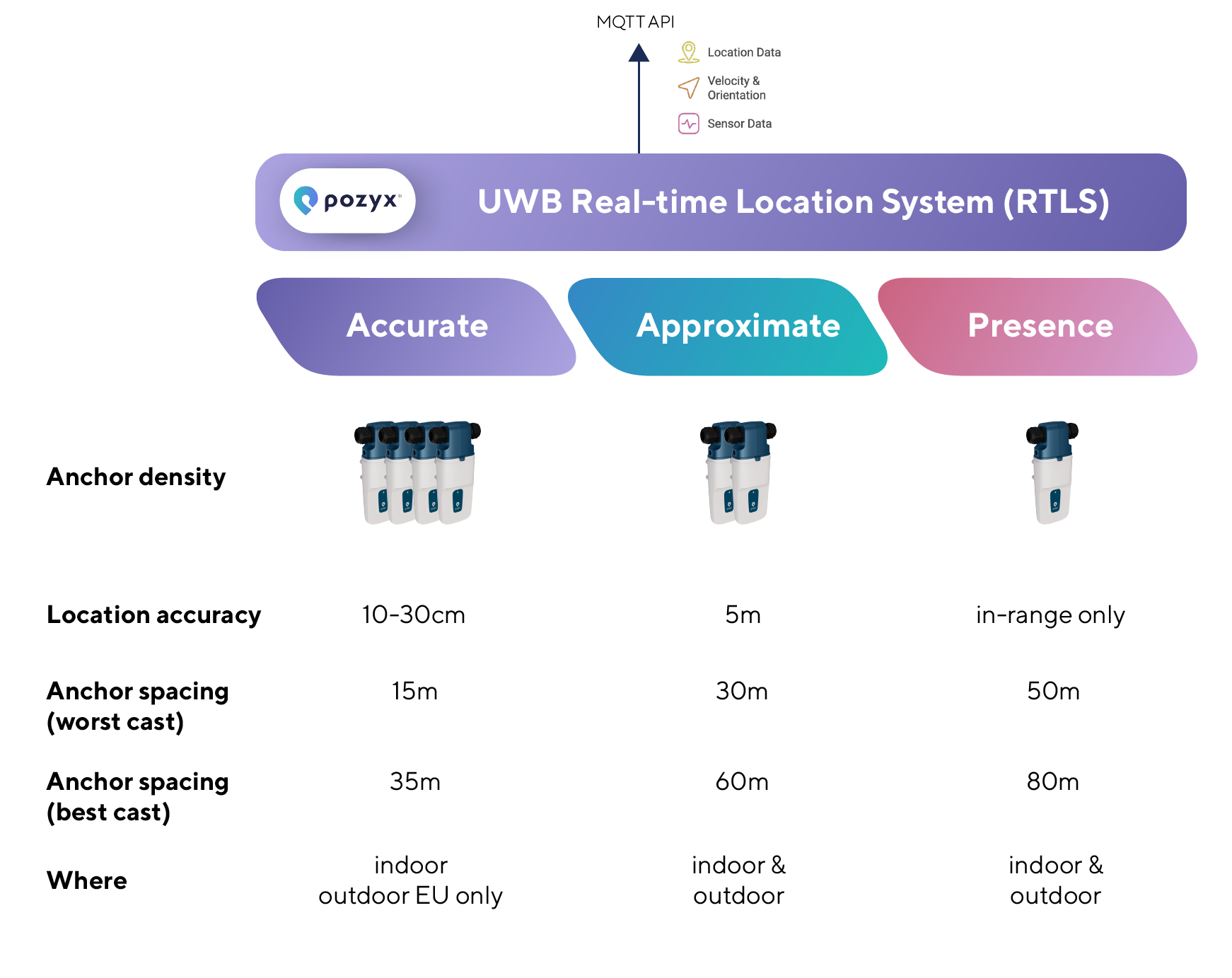
Met deze nieuwe functie past het systeem zich dynamisch aan op het aantal en de spreiding van anchors in elke zone. UWB-implementaties met hoge dichtheid blijven nauwkeurige positionering leveren met een nauwkeurigheid van 10 tot 30 cm. In zones met minder anchors schakelt het systeem automatisch over op benaderde positionering met ongeveer 5 m nauwkeurigheid. Wanneer slechts een anchor binnen bereik is, zorgt het voor aanwezigheidsdetectie en bevestigt het of een asset in de buurt is.
Dit gelaagde nauwkeurigheidsmodel maakt een lagere infrastructuurdichtheid mogelijk in niet-kritieke zones, terwijl volledige assetzichtbaarheid op de site behouden blijft. Het is ideaal voor gefaseerde implementaties, kostengevoelige uitbreidingen en hybride indoor-outdoor tracking.
Native omlox-hubconnector
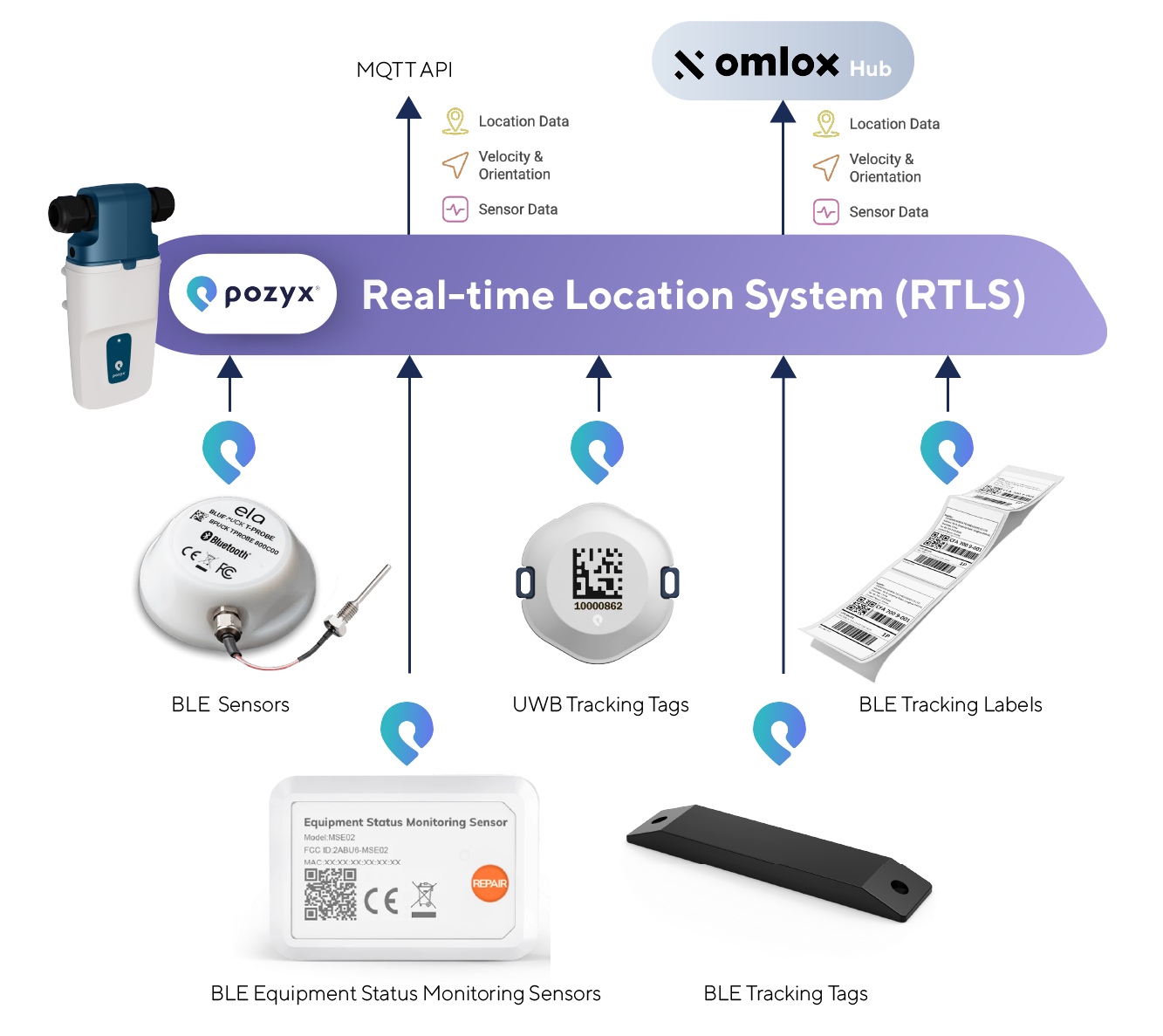
Het belangrijkste onderdeel van RTLS v2025.2 is de introductie van een native omlox-hubconnector.
Met deze nieuwe connector kan Pozyx RTLS nu eenvoudig verbinding maken met elke omlox hub, waardoor interoperabiliteit via de open omlox-standaard mogelijk wordt. Hierdoor kan een RTLS-systeem meerdere gebouwen, zones en verdiepingen dekken door verbinding te maken met verschillende omlox-zones.
Voor klanten die op grote sites of op meerdere locaties werken, vermindert dit de integratie-inspanning aanzienlijk en vereenvoudigt het de systeemarchitectuur. Locatiegegevens kunnen consistent worden doorgegeven aan bedrijfsapplicaties, terwijl de flexibiliteit behouden blijft om verschillende locatietechnologieen en leveranciers te combineren.
Blijf op de hoogte!
Blijf op de hoogte met de Pozyx e-mail nieuwsbrief. Leer van branchedeskundigen van RTLS en UWB. Ontvang meldingen over productupdates, tips en exclusieve aanbiedingen voor abonnees. Ontvang uitnodigingen voor evenementen en gratis toegangskaarten. Lees als eerste onze artikelen en blogs. Mis het niet! Geen spam, beloofd.
Ja, meld me aan
Verbeterde prestaties voor statische tags
Statische assets zoals pallets, gereedschap of containers krijgen vaak te maken met uitdagende omstandigheden zoals trillingen, metaalinterferentie en beperkte signaalbeschikbaarheid.
In deze release hebben we de logica voor detectie van statische tags verder verbeterd door UWB-metingen te combineren met sensordata om beter te bepalen wanneer assets stilstaand zijn. Hoewel de afhandeling van statische tags al enige tijd beschikbaar is, levert deze update stabielere en nauwkeurigere positionering op in veeleisende industriële omgevingen.
Betere platformintegratie, beveiliging en stabiliteit
RTLS v2025.2 biedt ook een nauwere integratie met het Pozyx Platform, waardoor configuratie, monitoring en dagelijkse werking gestroomlijnder verlopen.
Daarnaast bevat deze release meerdere beveiligingsverbeteringen en bugfixes die de robuustheid en betrouwbaarheid van het systeem verder versterken voor enterprise-implementaties.
Gebouwd voor schaal, vandaag en morgen
RTLS v2025.2 is opnieuw een stap richting een flexibeler, interoperabeler en schaalbaarder RTLS-platform. Het maakt snellere uitrol, eenvoudigere uitbreiding en een betere afstemming op open standaarden zoals omlox mogelijk.
We blijven het Pozyx RTLS-systeem voortdurend verbeteren en hebben al spannende functies in ontwikkeling voor de release van 2026. Feedback van klanten en partners speelt een belangrijke rol in het vormgeven van onze roadmap, dus als je ideeen of functieverzoeken hebt, horen we die graag.
Geschreven door
Samuel Van de Velde

CTO en medeoprichter van Pozyx
Samuel is Burgerlijk ingenieur met een sterke interesse in locatietechnologie. Bekwaam in ondernemerschap, publiek spreken, productbeheer, internet der dingen (IoT) en machine learning. Na zijn afstuderen aan de UGent in 2010 ging hij aan de slag bij de afdeling Telecommunicatie en Digitale Informatieverwerking (TELIN) om een doctoraat te behalen op het gebied van collaboratieve localisatie binnenshuis. In 2015 richtte hij op basis van dat onderzoek het spin-offbedrijf Pozyx op.