UWB versus andere trackingtechnologieën in 2026

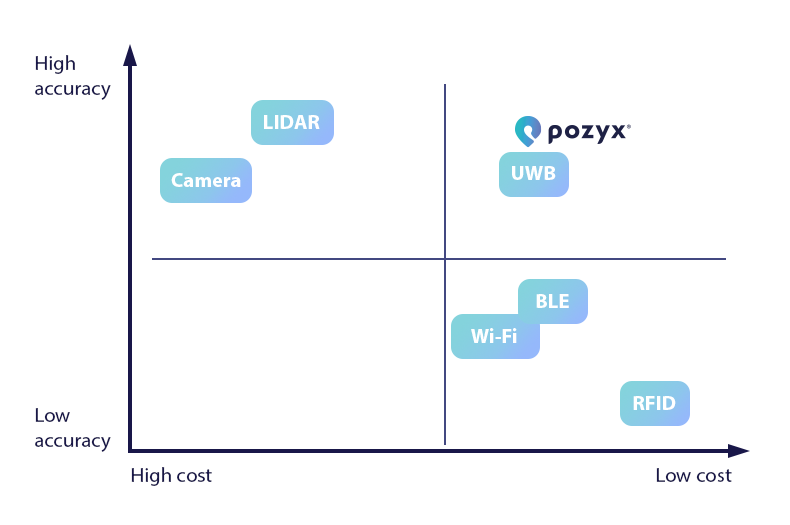
Het kiezen van de juiste indoor trackingtechnologie voor uw bedrijf is essentieel voor succesvolle resultaten. Elke trackingtechnologie heeft zijn eigen voor- en nadelen. Deze blog vergelijkt Pozyx’ ultra-wideband (UWB)-technologie met andere trackingtechnologieën, zodat u de juiste keuze voor uw bedrijf kunt maken. Ultra-wideband is een uiterst nauwkeurige en kosteneffectieve locatieoplossing voor indoor tracking.
Houd er rekening mee dat we in dit overzicht niet elke mogelijke trackingtechnologie hebben opgenomen. Enkele andere noemenswaardige technologieën zijn 5G-positionering, visueel lichtpositionering of ultrasone positionering. Deze technologieën zijn weggelaten omdat ze tot op heden niche blijven, hetzij omdat ze nog in een actieve onderzoeksfase zitten, hetzij omdat de marktpenetratie zeer laag is.
UWB versus GPS
GPS (of meer algemeen GNSS) is een bekende trackingtechnologie en wordt dagelijks door miljoenen mensen gebruikt. Standaard GPS-tracking kan in de meeste buitengebieden wereldwijd een positioneringsnauwkeurigheid van ongeveer 10 m bieden. Het grootste nadeel is dat het niet binnenshuis werkt, of in zogenaamde urban canyons (steden met hoge gebouwen). Voor asset tracking hebben GPS-trackers altijd een communicatielink nodig om de locatiebepaling op het apparaat naar asset trackingsoftware te sturen. Meestal wordt connectiviteit geleverd via het mobiele netwerk zoals 2G, 4G of 5G, of via een draadloos netwerk met groot bereik zoals LoRaWAN. Dit vereist allemaal een soort maandelijkse connectiviteitsvergoeding. Vandaag de dag zijn GPS/GNSS-ontvangers nog steeds relatief energie-intensief, dus tenzij de GPS-tracker van stroom kan worden voorzien, is het aantal GPS-updates per dag beperkt tot enkele updates per dag of per uur.
Ultra-widebandtechnologie daarentegen is gemaakt voor indoor tracking en ondervindt binnenshuis niet dezelfde uitdagingen als GPS. Het biedt een nauwkeurigheid van 10-30 cm, vereist geen betaalde connectiviteit en kan meer dan 5 jaar meegaan op één batterij met updates om de paar seconden. Het nadeel van UWB-tracking is dat er een infrastructuur op locatie moet worden geïnstalleerd.
UWB-locatiegegevens kunnen ook worden gecombineerd met GPS-locatiegegevens in het Pozyx Platform. Het platform is compatibel met GPS conform de omlox-standaard en kan daardoor de Pozyx ultra-widebandsignalen combineren met GPS-signalen. Zo is het volgen van assets van binnen naar buiten en omgekeerd met een naadloze overgang nog nooit zo eenvoudig geweest.

UWB versus RFID
RFID, of Radio Frequency Identification, gebruikt radiogolven om draadloos informatie te verzenden of te ontvangen. Het systeem gebruikt labels met unieke informatie die aan een persoon of object worden bevestigd. Bij RFID is het belangrijk om actief en passief RFID van elkaar te onderscheiden, omdat de twee verschillend werken.
UWB versus passieve RFID
Bij passieve RFID moet de tag eerst langs een gateway-reader gaan voordat deze wordt gepositioneerd. Er is geen realtime positionering. Deze tags zijn goedkoop, tot op centen, omdat ze geen eigen energiebron hebben en alleen activeren wanneer ze een radiosignaal van de antenne ontvangen.
Een bekende dagelijkse toepassing van RFID is NFC, een subset van RFID die op een hogere frequentie werkt. Het wordt bijvoorbeeld gebruikt bij toegangspoorten in metrostations, waar u uw kaart met een NFC-chip op de NFC-reader moet scannen om de deuren te laten openen. Andere toepassingen zijn RFID-tags in kleding of andere retailproducten.

Als het gaat om het vinden van assets, is passieve RFID niet geschikt. Passieve RFID heeft niet alleen een foutmarge van 3%, maar als een asset verloren raakt, is deze meestal niet langs de gateway gekomen, wat betekent dat hij niet is geactiveerd en ook geen locatie-informatie heeft verzonden. De foutmarge wordt echt problematisch bij het volgen van assets met metaal, omdat dit de leesbaarheid van een RFID-tag aanzienlijk beïnvloedt. Met ultra-wideband verzenden de tags informatie op een hogere frequentie en worden ze in realtime gepositioneerd, waardoor uw assets altijd zichtbaar zijn, in het hele gebouw.
In onze Bonduelle-case study wordt duidelijk dat ultra-wideband en passieve RFID naadloos samen kunnen werken. Hoewel Bonduelle RFID al gebruikte om hun pallets te volgen, raakten er nog steeds jaarlijks talloze pallets zoek of verloren. Door het Pozyx-systeem te installeren en de industriële tags aan hun heftrucks te bevestigen, wisten ze welke assets op welke punten werden opgepakt en neergezet, wat resulteerde in een efficiëntiewinst van 3%.
UWB versus actieve RFID
Bij actieve RFID-systemen hebben de labels een eigen energiebron, waardoor het label continu data kan verzenden en realtime positionering mogelijk wordt. De nauwkeurigheid loopt op tot 3 meter (of 10 voet), terwijl ultra-widebandtechnologie een nauwkeurigheid van 10-30 cm (4-12 inch) heeft. Een enorm verschil. Bovendien heeft actieve RFID een faalpercentage tussen 5% en 20%. Gezien deze uitdagingen en de hogere kosten van actieve RFID is ultra-wideband hier de betere optie, zowel qua prestaties als qua kostenefficiëntie.
Ontdek het Pozyx Platform
Het Pozyx platform brengt positioneringsgegevens samen om volledige zichtbaarheid te geven aan logistiek en productie.
Pozyx PlatformUWB versus BLE
Bluetooth is een veelgebruikte communicatietechnologie en wordt in het dagelijks leven gebruikt voor tal van draadloze apparaten. Koptelefoons, draadloze muizen, toetsenborden en speakers gebruiken allemaal Bluetooth om verbinding te maken met onze smartphones en laptops.

Bluetooth Low Energy, of BLE, werd geïntroduceerd in 2010. Het gebruikt dezelfde technologie als gewone Bluetooth, maar verbruikt, zoals de naam al aangeeft, aanzienlijk minder energie om met andere apparaten te communiceren. De meest voorkomende toepassingen zijn slimme apparaten, asset tracking en indoor positionering.
BLE was oorspronkelijk niet ontworpen voor indoor tracking en is eerder een bijproduct van de technologie. Het werkt door de positie van de BLE-tag te berekenen via de signaalsterkte die door meerdere beacons wordt ontvangen. Dit wordt RSSI (receive signal strength indicator) genoemd en is niet de meest efficiënte meetmethode. BLE-tracking heeft een nauwkeurigheid van ongeveer 5 meter en is slechts 90% van de tijd effectief, terwijl ultra-widebandtechnologie een positionering met een nauwkeurigheid van 10 tot 30 cm kan bereiken. Dit komt doordat het ultra-widebandsysteem de positie niet meet via signaalsterkte, maar via Time of Flight (ToF). Het berekent de tijd die de radiogolf nodig heeft om tussen de tag en de anchor te reizen. Het Pozyx-systeem berekent dit voor minstens drie anchors en positioneert de tag op het snijpunt van de drie afstanden; dit heet trilateratie.
Wat betreft de batterijduur van tags zijn BLE en UWB relatief vergelijkbaar: beide kunnen meerdere jaren meegaan op één batterij en locatie-updates om de paar seconden verzenden. Qua kosten zijn UWB-tags ongeveer twee keer zo duur als BLE-tags.
Vanaf 2019 ondersteunt de BLE 5.1-standaard ook zogenaamde angle-of-arrival, wat de positioneringsnauwkeurigheid verbetert tot minder dan 1 meter. Dit werkt echter niet met standaard BLE-tags en vereist een dichtere en complexere infrastructuur die de hoek kan meten.
Op basis van de kosten en de vereiste nauwkeurigheid kunnen zowel BLE als UWB een goede optie zijn voor indoor tracking. Over het algemeen wordt UWB beschouwd als de gouden standaard en aanbevolen voor industriële omgevingen. In kantoor-, school- of ziekenhuisomgevingen is BLE daarentegen vaak een geschikte technologie. Met de Pozyx RTLS hoeft u niet te kiezen: de infrastructuur kan zowel BLE- als UWB-tags ondersteunen, zodat u de meest geschikte tag kunt kiezen op basis van de kosten en de vereiste nauwkeurigheid.
UWB versus camera-gebaseerde tracking
Camera-gebaseerde positionering is haalbaarder geworden door de opkomst van AI-gestuurde beeldverwerking. Hieronder worden twee verschillende benaderingen voor positionering beschreven. Beide hebben echter gemeen dat er nog steeds zware verwerking nodig is, wat resulteert in een hoog energieverbruik en het gebruik van (dure) verwerkingsunits.
Camera-infrastructuur
Bij één benadering wordt een vaste camera-infrastructuur met meerdere camera’s in meerdere ruimtes gebruikt om mensen, voertuigen of andere assets binnen het gezichtsveld te volgen. Met een AI-model dat specifiek is getraind om deze objecten te detecteren, is het mogelijk om deze objecten in realtime te lokaliseren. Een uitdaging bij camera-gebaseerde tracking is het identificeren van het gevolgde object. Het volgen van koeien, rekken of dozen die er allemaal hetzelfde uitzien is mogelijk, maar het is heel moeilijk om te zeggen welke waar is. Dit probleem wordt nog groter wanneer objecten van de ene camera naar de volgende bewegen. Op de een of andere manier moet het camerasysteem het object identificeren en weten dat het om hetzelfde object gaat dat van het ene gebied naar het andere beweegt. In de praktijk kunnen deze systemen dit niet foutloos doen. Bovendien kunnen situaties met vervormde, (gedeeltelijk) verborgen of slecht verlichte objecten leiden tot trackingfouten of zelfs tot het volledig niet kunnen volgen van het object.
Deze uitdagingen, samen met mogelijke privacyzorgen, maken cameratracking minder geschikt voor de meeste asset tracking-toepassingen. Met UWB heeft elk asset daarentegen een unieke tracker met een unieke identificatie, waardoor het associatieprobleem wordt opgelost. De betrouwbaarheid van UWB-tracking is aanzienlijk beter dan die van een camerasysteem. Het nadeel is natuurlijk dat elk object dat u wilt volgen een tracker nodig heeft.
Cameratrackers
Bij een andere benadering wordt de camera bevestigd aan het asset dat gevolgd moet worden. Net zoals mensen hun ogen gebruiken om te bepalen waar ze zijn, werkt dit systeem ook. Om het camerasysteem echter wat te helpen, worden doorgaans enkele visuele herkenningspunten aan de omgeving toegevoegd. Dit kunnen afbeeldingen op de vloer of het plafond zijn, of QR-code-stickers op vaste locaties.

Deze aanpak kan goede positioneringsresultaten opleveren met nauwkeurigheden van 10 tot 30 cm. Door de grootte- en vermogensbeperkingen is dit echter meestal beperkt tot voertuigen, robots en bepaalde VR-headsets. In vergelijking daarmee is een camerasysteem aanzienlijk duurder dan een goedkope UWB-tag. Het vereist echter geen infrastructuur. Bij ultra-wideband tracking is een initiële investering nodig om de UWB-infrastructuur op te zetten voordat het volgen kan beginnen. Zodra deze infrastructuur aanwezig is, zijn de kosten per extra UWB-tag verwaarloosbaar. Daarentegen zijn de initiële kosten bij camera-gebaseerde tracking beperkt, maar stijgt de prijs aanzienlijk naarmate er meer objecten gevolgd moeten worden. Afhankelijk van het gebied dat moet worden gedekt, kan het omslagpunt al bij enkele assets liggen, of pas bij enkele tientallen assets. Over het algemeen geldt: als u meer dan 50+ assets wilt volgen, is UWB-positionering altijd kostenefficiënter.
UWB versus Wi-Fi Positioning Systems (WPS)
Wi-Fi is sinds de eerste introductie uitgegroeid tot een van de belangrijkste communicatietechnologieën ter wereld. Enkele jaren na de eerste release werd het een van de eerste technologieën die werd gebruikt voor indoor positionering. Wi-Fi is vandaag de dag nog steeds een effectieve technologie voor indoor positionering, maar de suboptimale nauwkeurigheid maakt UWB-tracking geschikter voor precieze lokalisatie.
Wi-Fi indoor positionering gebruikt ofwel de bestaande infrastructuur of speciaal geïnstalleerde sensoren. Beide hebben doorgaans een nauwkeurigheid van 5-15 meter, tegenover de 10-30 cm die met ultra-widebandtechnologie kan worden bereikt.
Aanvankelijk werd WiFi-positionering vooral gebruikt om WiFi-apparaten zoals laptops en smartphones in een gebouw ‘globaal’ te volgen. De laatste tijd worden batterijgevoede wifi-trackers echter steeds populairder, omdat ze in combinatie met GPS/GNSS worden gebruikt. Deze trackers scannen naar WiFi-toegangspunten, sturen deze informatie terug naar de cloud (via 4G of 5G), waar een wereldwijde database met locaties van WiFi-toegangspunten wordt geraadpleegd. Deze databases worden samengesteld door grote techbedrijven zoals Google, die deze gegevens via Google Maps crowdsourcen. De nauwkeurigheid hiervan is doorgaans beperkt tot enkele tientallen meters, maar het voordeel is dat het een ruwe indoor-lokalisatie kan bieden als fallback voor GPS.
Voor de volledigheid kan worden opgemerkt dat WiFi in 2016 extra functionaliteit heeft toegevoegd om nauwkeurigere range-based positionering mogelijk te maken. Deze aanvulling op de basis-WiFi-standaard (onder IEEE 802.11mc) zou positionering met een nauwkeurigheid van 1-2 m mogelijk kunnen maken. Tot op heden is de adoptiegraad bij leveranciers van access points of fabrikanten van apparaten echter nog steeds zeer beperkt, waardoor deze technologie (nog?) niet haalbaar is.
UWB versus LIDAR
LIDAR, of Light Detection And Ranging, werkt met een roterende laser om nauwkeurig de afstand en hoek tot obstakels te meten. De meest gebruikte toepassing is in zelfrijdende auto’s. In een industriële omgeving wordt het ook gebruikt voor autonome mobiele robots (AMR) die autonoom moeten navigeren zonder tegen obstakels aan te botsen. Vanwege de aard ervan is LIDAR niet geschikt voor het volgen van niet-aangedreven assets of mensen.
LIDAR kan op zichzelf geen (absolute) positionering bieden, maar kan wel helpen om te begrijpen of er obstakels rond de sensor zijn. In bepaalde omstandigheden, wanneer een gedetailleerde kaart van de omgeving beschikbaar is, kan de locatie worden bepaald door bepaalde statische kenmerken of obstakels te matchen tussen de LIDAR-uitvoer en de kaart. In scenario’s met veel bewegende objecten, open ruimtes of ruimtes met herhalende patronen (zoals een magazijn met identieke gangpaden) is het niet mogelijk om op deze manier alleen met LIDAR te positioneren. Meestal wordt LIDAR gecombineerd met een andere locatietechnologie (zoals UWB) voor absolute positionering. Dankzij de nauwkeurigheid van LIDAR is het dan mogelijk om de positionering te verbeteren tot millimeternauwkeurigheid.
Conclusie
Hoewel er veel indoor trackingtechnologieën zijn, is ultra-widebandtechnologie in de meeste gevallen de aangewezen methode voor nauwkeurige realtime positionering in industrie 4.0. In deze tabel worden de eerder besproken punten samengevat.
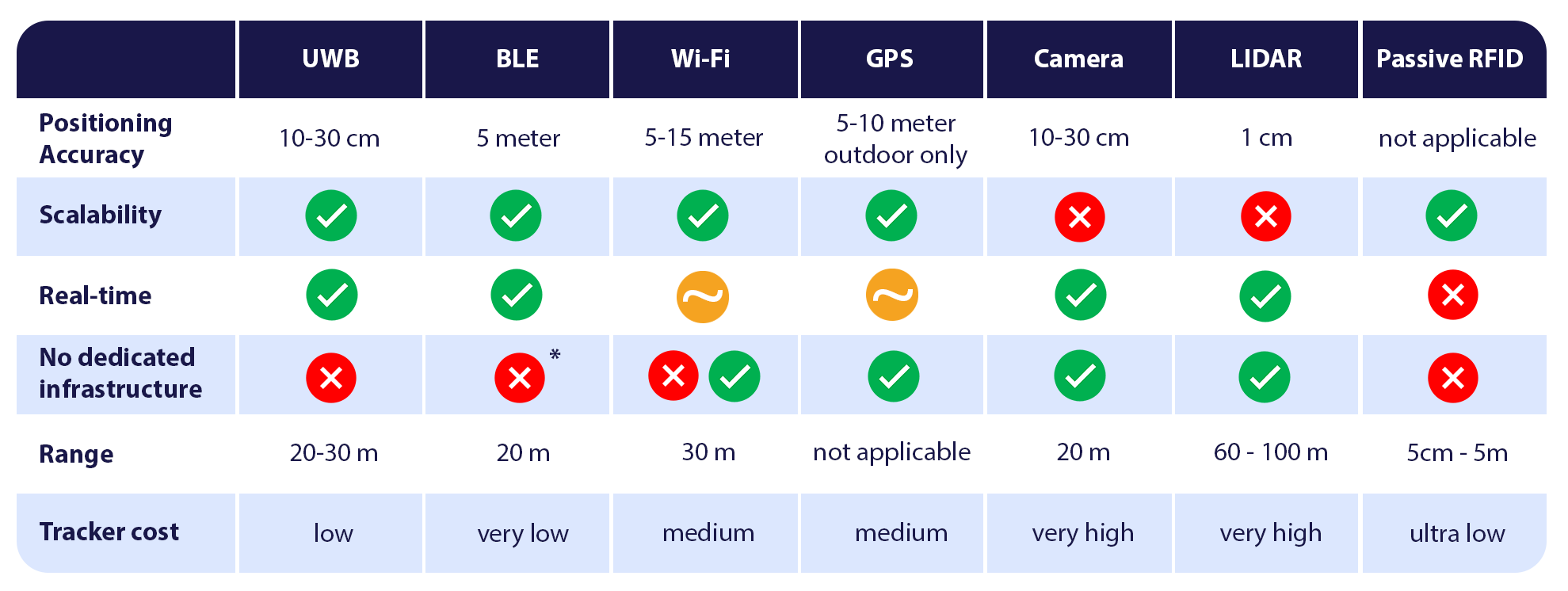
In deze tabel geven de oranje cirkels aan dat voor WiFi en GPS de locatie realtime kan worden bepaald, maar doorgaans met een zeer lage updatefrequentie (enkele keren per uur of per dag). De asterisken voor BLE-infrastructuur geven aan dat in bepaalde scenario’s (met WiFi-access points die BLE-positionering ondersteunen) geen extra infrastructuur nodig is. Voor de meeste access points is dit echter niet het geval.
Wilt u ontdekken wat nauwkeurige positionering voor uw bedrijf kan betekenen? Plan een gesprek in met een van onze RTLS-experts; zij staan klaar om u te adviseren en te inspireren met onze use cases.
Wat onze klanten zeggen
Geschreven door
Melanie Deputter

Digital Marketing Officer bij Pozyx