Pozyx Platform v3.1 : suivi plus intelligent, analyses renforcées, flexibilité accrue

Avec la sortie de Pozyx Platform v3.1, nous franchissons une nouvelle étape pour rendre le suivi des actifs plus simple, plus puissant et plus accessible, que vous opériez en intérieur, en extérieur ou entre les deux.
Cette mise à jour vise à tirer davantage de valeur de vos données, à étendre les capacités de suivi et à affiner l’expérience sur l’ensemble de la plateforme.
Suivi d’actifs BLE avec scan (nouveau)
L’une des principales nouveautés de la v3.1 est le suivi d’actifs BLE avec scan.
Les traceurs GPS peuvent désormais détecter les balises BLE à proximité, offrant ainsi une solution économique et flexible pour suivre les outils et les actifs sans nécessiter une infrastructure complète.
Ce que cela permet :
- Suivre les outils sur la route à l’aide d’un camion équipé d’un scanner BLE
- Détection de présence dans les entrepôts ou les installations
- Visibilité des actifs dans des environnements à faible infrastructure
Dans de nombreux cas, un seul scanner BLE sans fil alimenté par batterie suffit pour démarrer, ce qui en fait une solution hautement évolutive pour les opérations distribuées.
Une expérience cartographique plus puissante
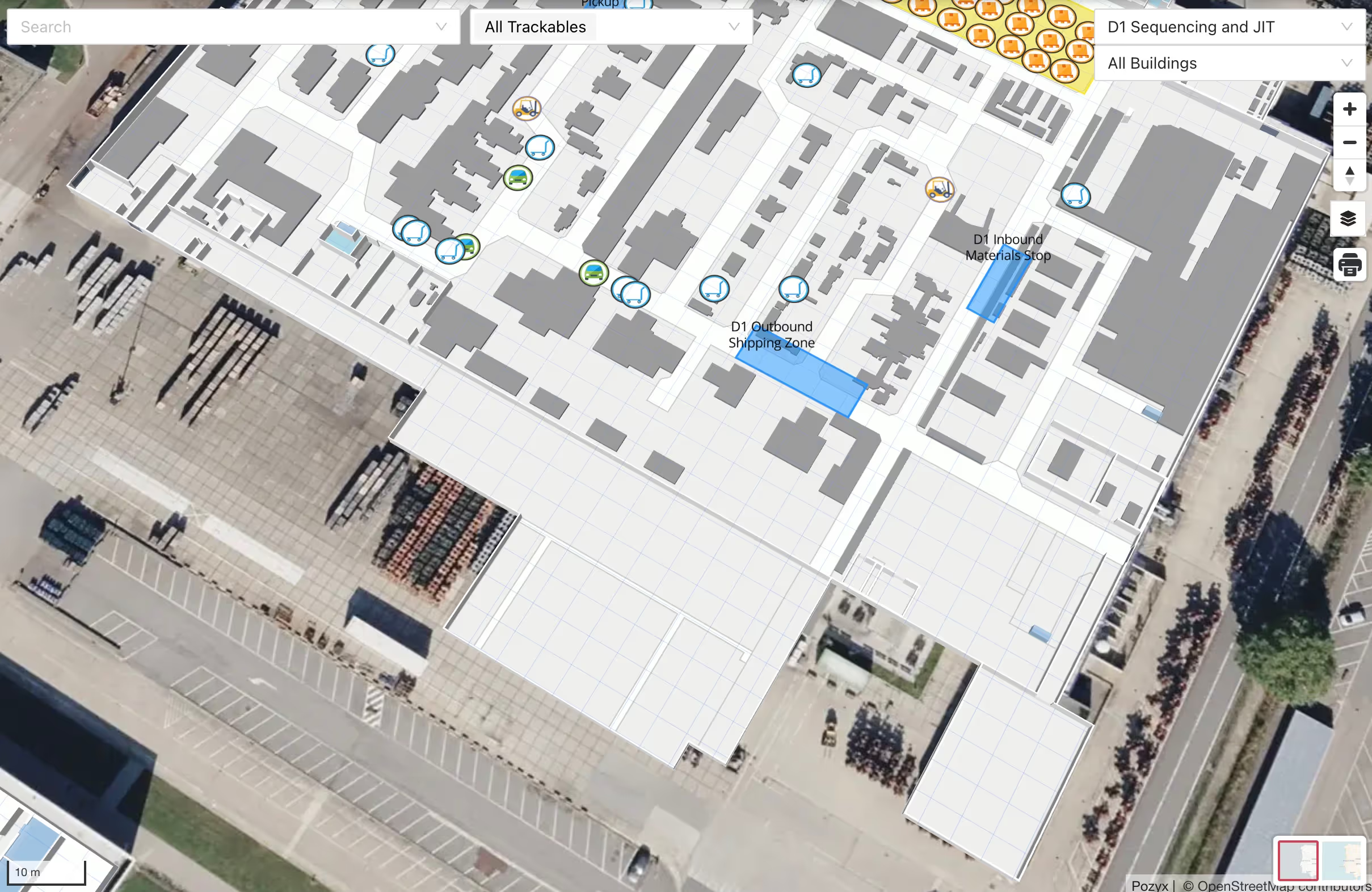
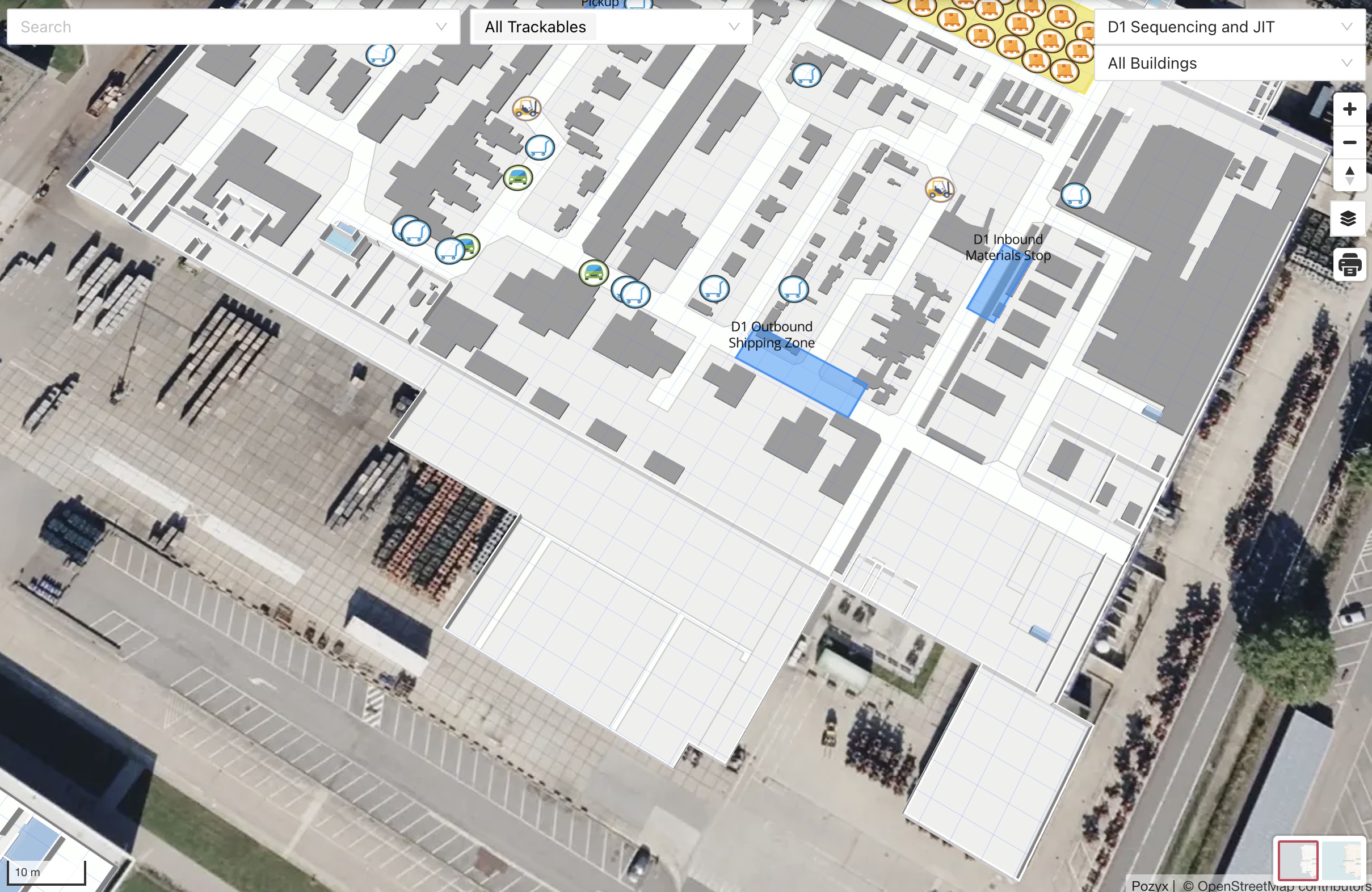
Nous avons entièrement repensé la vue d’ensemble de la carte afin de vous offrir davantage de contexte, plus rapidement.
Au lieu de simplement afficher des emplacements, la carte met désormais en avant ce qui compte réellement pour vos opérations quotidiennes :
- Les éléments suivis nécessitant une attention
- Les détails des géofences
- Les trajets ou missions en cours
- Les déplacements historiques
Si les données sous-jacentes n’ont pas changé, leur présentation, elle, a évolué. Le résultat est une interface plus exploitable, intuitive et percutante, qui aide les équipes à prendre des décisions plus rapidement.
Un suivi GPS renforcé pour les opérations extérieures
La plateforme v3.1 renforce notre prise en charge du suivi d’actifs et d’inventaire basé sur le GPS dans les environnements extérieurs et isolés.
Idéal pour :
- Les parcs et sites industriels
- Les emplacements éloignés ou temporaires
- Le stockage extérieur et les hubs logistiques
Principales améliorations :
- Compatibilité renforcée avec les traceurs GPS Digital Matter
- Traitement des données plus fiable et intégration plus fluide
- Fond de carte satellite pour une meilleure visibilité en extérieur
- Recherche d’adresses et emplacements lisibles au lieu de coordonnées brutes
Pour les environnements où l’imagerie satellite ne suffit pas, vous pouvez désormais intégrer également des images de drone ou aériennes, idéales pour :
- Les chantiers de construction
- Les terminaux portuaires
- Les grandes installations industrielles
Plus d’informations sur les nouvelles capacités cartographiques ici.
De petites améliorations, mais de taille 💪
Nous avons également apporté une série d’améliorations ciblées sur l’ensemble de la plateforme :
- Tableau de bord de visibilité des processus amélioré, avec des informations sur le temps passé à chaque étape
- Améliorations continues de la API publique
- Détection du temps d’arrêt plus précise pour le GPS et l’UWB
- Améliorations des performances pour les trajets et missions
- Corrections de bugs générales et améliorations de la stabilité
Conçu pour les opérations du monde réel
Avec la v3.1, Pozyx continue de combler l’écart entre le suivi en intérieur et en extérieur, tout en rendant ses fonctionnalités avancées plus faciles à déployer et à utiliser.
Que vous suiviez des outils en déplacement, surveilliez des actifs dans des lieux éloignés ou optimisiez les flux de travail sur site, cette version vous offre plus de flexibilité, une meilleure visibilité et des analyses plus rapides.
Rédigé par
Samuel Van de Velde

CTO et co-fondateur chez Pozyx
Samuel est ingénieur électricien avec un fort intérêt pour la technologie de localisation. Compétent en entrepreneuriat, prise de parole en public, gestion de produit, Internet des objets (IoT) et apprentissage automatique. Après avoir obtenu son diplôme en 2010, il a rejoint le Département des télécommunications et du traitement numérique de l'information (TELIN) pour poursuivre un doctorat sur le sujet de la localisation collaborative en intérieur. En 2015, il a fondé la spin-off Pozyx issue de cette recherche.