

TDOA and TWR Positioning protocols explained
This article is part of the Pozyx Academy and is the third in a series of five articles that explain how the Pozyx Technology works and what to account for when installing the Pozyx System.
- How positioning works
- How ultra-wideband works
- Positioning protocols explained
- Ultra-wideband and obstacles
- Where to place the anchors
Currently, Pozyx offers two positioning protocols: TDOA and TWR. Each protocol has its advantages and disadvantages and is better suited depending on the application. At the end of the article, the protocols are compared in a single table.
Time Difference of Arrival (TDOA)
In TDOA mode, tags will periodically transmit a UWB (ultra-wideband) blink, with or without any scheduling or regard for other tags or anchors. Because the tag must only send a single UWB transmission, the positioning can happen fast and at low power. With the commonly used Aloha protocol, tags only send and never receive, resulting in incredibly low power consumption, with battery lifetimes of several years. However, in order to limit the interference with other tags, the update rate is somewhat limited. Alternatively, the tags can be scheduled, as in TWR+, to achieve an even higher update rate.

When a tag in TDOA mode sends a blink “Hi, my ID is xxxx”, it is picked up by all anchors in range. Over ethernet lines, these anchors send the exact time of when they received the tag’s pulse, to the positioning server. Because the anchors are at different distances from the tag, these anchors will have received the tag’s pulse at slightly different times. Based on these time differences, the server can then calculate where the tag was relative to the anchors, the moment the tag sent its blink.
Geometrically, the position will be at the intersection of hyperboles defined by the measured time differences.
Notice: In TDOA the tag will never know its position, unless it is fed back to it which doesn't generally happen.
For Time Difference of Arrival to work, the anchors must have the same notion of time. To achieve this, their clocks must be accurately synchronized. That is why the anchors will periodically communicate with each other over UWB to synchronize their clocks. Even with the synchronization, anchors still need really precise clocks to enable TDOA, which are only available on the Pozyx anchors.
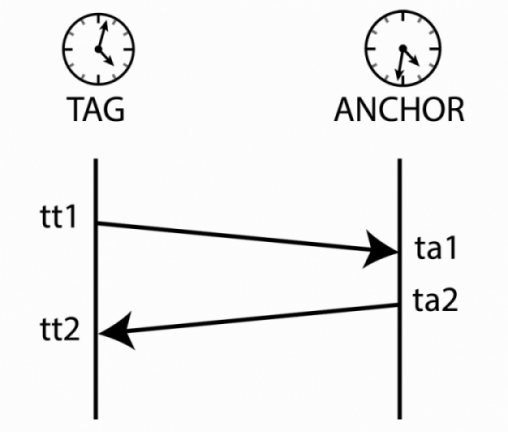
Two-way-ranging (TWR)
Two-way-ranging is perhaps the best known protocol for positioning. In TWR, the distance from a tag to the anchor is obtained by sending a packet back-and-forth. By measuring how long it took for the packet to return, the tag can estimate the distance to the anchor. For positioning, the tag initiates communication with the anchors and ranges with the anchors, one by one. Once the tag has ranged with at least three, ideally four anchors, it can compute its position by means of trilateration. Geometrically, the tag will be at the intersection of circles defined by the measured ranges.
TWR was the first solution we offered with our Pozyx Creator system. When there are multiple tags to be positioned, one tag is made the master and the other tags the puppets. The master tag instructs the puppet tags to position themselves vis-à-vis the anchors, one by one and report their position back. Typically, the master tag is then connected to a computer, Arduino or Raspberry Pi which in turn gets the positions of all the puppet tags via the master. This is also how our cloud app works for the Creator system.
This approach, with a single master tag, does not scale well to large areas, as all other tags must be within radio range of the master tag. in order to achieve scalable TWR, referred to as TWR+, the function of the master tag is replaced by the network of anchors, which dynamically schedule which tag must be positioned. TWR+ is implemented on the Pozyx Enterprise system where the schedule is computed on the central server and distributed to the anchors. What sets TWR+ apart is that the positioning server also knows all the tags’ positions in real-time. Because of this, the server can, via the anchors, schedule tags efficiently and assign them only those anchors that are nearest/easiest to reach. This is commonly referred to as “smart-scheduling” and “smart anchor selection”. Both of these practices help increase the update rate of tags as they do not need to wait for other tags or anchors that might be out of range anyway. Tags only use those anchors nearest to them and wait only to avoid interference with those tags that are close enough to be disturbed.
Because there is no master tag, TWR+ can scale in both numbers of tags and anchors, with no limits.
Comparison table
So let's put everything together. Of course, a lot depends on the actual implementation, as there is no standard implementation for these protocols.
*The theoretic maximum total update rate is calculated with a number of assumptions: the shortest UWB packets (resulting in the smallest range), no guard times, 4 anchors used and instant computing. This is not very realistic. However, it does give a clear indication of which protocol has the advantage. Note that this maximum update rate is to be shared between all tags within a radio cell (roughly 1000 sqm). So with 100 tags in Aloha TDOA mode, the theoretic maximum update rate for each tag would be around 13 Hz.
From the comparison, we see that TDOA has the advantage in low-power, large-scale applications such as asset tracking. Similarly, in applications that require very high update rates, such as in competitive sports, TDOA has an advantage. In other applications, such as ad-hoc, non-permanent applications, TWR may be more suitable. TWR would also be a preferred choice for applications where the tags would be outside the anchor area.
In terms of accuracy, both protocols offer similar horizontal accuracy within the area of the anchors. Outside the anchor area, accuracy will degrade much faster for TDOA as compared to TWR. For 3D positioning, both protocols can accurately estimate the height, however, this depends a lot on the anchor placement. In general, with only anchors mounted on the ceiling, TDOA will be very poor at estimating the height. This is less the case for TWR, which can still provide a relatively accurate result.
Read the next article on ultra-wideband and obstacles to learn more about Pozyx’s technology.